ในการกำหนดค่าการขับประเภทนี้ แรงขับเคลื่อนจะกำหนดโดยสมการ
Fx = (eAv2)/(2x2)
กำหนดให้ A = พื้นที่โดยรวมของแผ่นเพลทขนาน
e = การยอมให้ (Permittivity) ของอากาศ
v = แรงดันไฟฟ้าที่ข้ามผ่านแผ่นเพลท
x = การแยกแผ่นเพลท
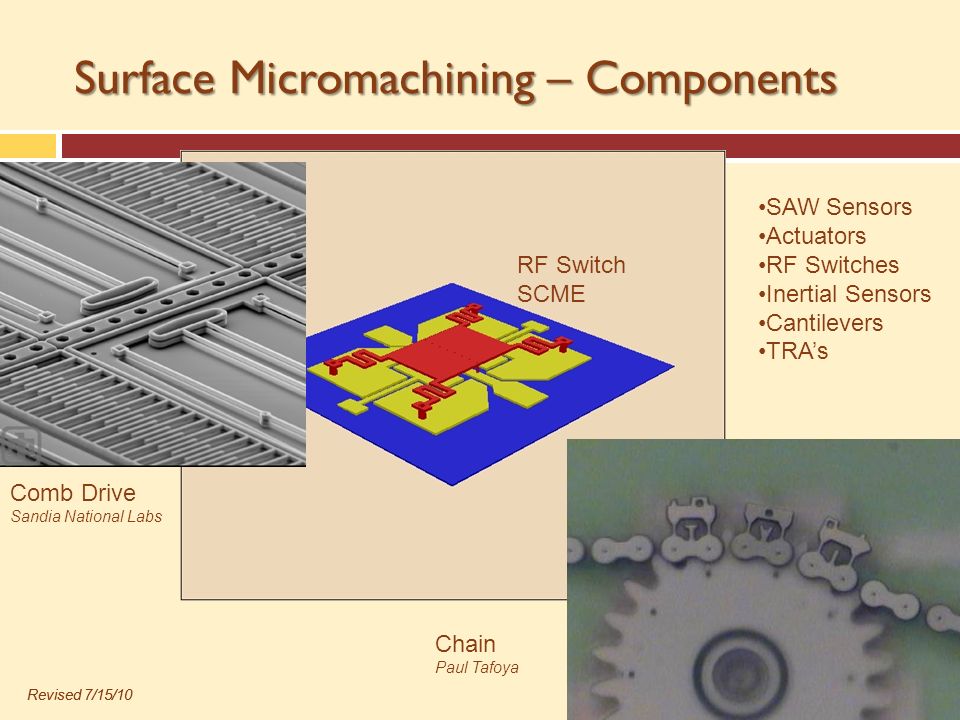
แรงอุปกรณ์ของการขับซี่หวีกำหนดโดย
Fx = (ewv2)/(2d2)
กำหนดให้ w = ความกว้างของแผ่นเพลท
d = การแยกแผ่นเพลท
ขนาดการตรวจสอบความสัมพันธ์ทั้งสองแสดงให้เห็นว่า แรงเป็นอิสระจากการคำนวณทางเรขาคณิต และทางจลน์ นั่นคือ ส่วนอุปกรณ์ไฟฟ้าสถิต คือการลดลงของเรขาคณิต และทางจลน์ โดยตัวประกอบของ N แรงที่สร้างโดยอุปกรณ์ทำงานจะเหมือนกัน ตั้งแต่แรงที่เกี่ยวข้องกับปรากฏการณ์ทางฟิสิกส์อื่น ๆ ส่วนใหญ่จะลดลงอย่างมากเมื่อมีขนาดเล็กลง
ขนาดไมโคร แรงไฟฟ้าสถิตจะกลายเป็นความสัมพันธ์อย่างมีนัยสำคัญกับแรงอื่น ๆ การสังเกตดังกล่าวแสดงให้เห็นอย่างชัดเจนโดยข้อเท็จจริงว่าแรงระหว่างโมเลกุลทั้งหมดคือแรงไฟฟ้าสถิตในจุดเริ่มต้น และดังนั้นความแข็งแกร่งของวัสดุทั้งหมดคือ ผลของแรงไฟฟ้าสถิต
แรงที่สามารถทำได้สูงสุดของอุปกรณ์ทำงานไฟฟ้าสถิตหลายตัวคือขีดจำกัดโดยการเสียรูปไดอิเล็กทริคของอากาศ ซึ่งเกิดขึ้นในอากาศแห้งประมาณ 0.8 ´ 106 V/m ประมาณการว่าขีดจำกัดด้านบนสำหรับการสร้างกำลังในการกระตุ้นไฟฟ้าสถิตประมาณ 10 N/cm2
เนื่องจากการขับด้วยไฟฟ้าสถิตไม่ได้มีการเปลี่ยนแปลงการทำงานอย่างมีนัยสำคัญ และเนื่องจากชิ้นส่วนเคลื่อนที่โดยปกติเล็กน้อย ช่วงแถบการทำงานของอุปกรณ์ค่อนข้างมีขนาดใหญ่ หรือตามลำดับของกิโลเฮิรตซ์
ระยะที่ทำได้สูงสุดสำหรับอุปกรณ์ทำงานกำหนดปกติเป็นการจำกัดโดยขอบเขตความยืดหยุ่นของการรอบรับการดัดงอ และนอกจากนี้โดยการพึ่งพาแรงอุปกรณ์ทำงานบนแผ่นเพลทที่แยกไว้ที่ระบุไว้ข้างต้น ตามที่เส้นโค้งแบบปกติสำหรับอุปกรณ์ทำงานการกำหนดค่าตามขนาดปกติของไมครอน การเคลื่อนที่สามารถทำได้โดยการสร้างตัวกระตุ้นไฟฟ้าสถิตในอนุกรม
จังหวะทั่วไปของอุปกรณ์ทำงานหวีพื้นผิวจักรกลไมครอน (Surface micromachined comb actuator)
รูปตัวอย่างอุปกรณ์ทำงานหวีพื้นผิวจักรกลไมครอน
แนะนำเพื่อให้อ่านได้ต่อเนื่องให้ คลิกขวาเลือก Open link in new window
มีขนาดไม่กี่ไมครอน แต่บางครั้งก็ขนาดน้อยกว่า จังหวะที่ทำได้สูงสุดในการขับหวีถูกจำกัดโดยหลักการกลศาสตร์ของการรองรับแบบยืดหยุ่น
การรองรับควรเป็นไปตามทิศทางของการทำงานที่สามารถเคลื่อนที่ได้มากขึ้น แต่ต้องตั้งฉากแข็งแรงทิศทางนี้เพื่อหลีกเลี่ยงการสัมผัสกับแผ่นเพลทขนาดที่ไม่ได้แนวศูนย์ โหมดของพฤติกรรมเหล่านี้น่าควบคุมได้ แต่น่าเสียดาย ดังนั้น เพื่อให้การทำงานเพิ่มขึ้นตามทิศทางของการเคลื่อนที่ก่อให้เกิดการเพิ่มขึ้นแบบสอดคล้องกันในทิศทางที่ตั้งฉาก ผลที่ได้คือการเคลื่อนที่ที่เพิ่มขึ้นตามความจำเป็นของแผ่นเพลทที่แยกเพิ่มขึ้น ซึ่งส่งผลให้แรงโดยรวมลดลง
ข้อคิดดี ๆ ที่นำมาฝาก
“ความสำเร็จ ในวันข้างหน้า
อาจเริ่มที่ ความกล้าในวันนี้”
<หน้าที่แล้ว สารบัญ หน้าต่อไป>
{kind=link}