มีอุปกรณ์หนึ่งที่เราอาจเคยพบเห็น นั่นก็คือ ตัวจับเวลา / ตัวนับ (Timer / Couter) ที่เป็นแบบ 8 –บิต (มักจะมีพรีสเกลาร์ (Prescaler)) ที่มีสามารถนับได้ทั้งเหตุการณ์ภายนอก (จะมีพัลซ์เป็นตัวเลือกจากตำแหน่งที่เพิ่มขึ้น) และเป็นนาฬิกาอยู่ภายใน เพื่อวัดช่วงเวลา และสร้างได้เป็นระยะ ซึ่งสามารถสร้างการขัดจังหวะ หรืออัตราการส่ง เพื่อการสื่อสารแบบอนุกรม
รูปตัวอย่างตัวจับเวลา / ตัวนับ
แนะนำเพื่อให้อ่านได้ต่อเนื่องให้ คลิกขวาเลือก Open link in new window
ยังมีวัตถุประสงค์ทั่วไปของตัวนับแบบ 16 –บิต และรูปแบบการรีจีสเตอร์ที่เหมาะสมที่เป็นได้ทั้งหน่วยความจำที่สามารถทำการจัดเก็บแบบชั่วคราวในช่วงเวลาของการป้อนข้อมูลชั่วขณะ
หรือหน่วยเปรียบเทียบที่การสร้างการป้อนข้อมูลชั่วคราวในด้านขาออกที่อาจจะเป็นสถานะของการขับมอเตอร์ ซึ่งอาจเป็น สัญญาณการปรับความกว้างพัลซ์ หรือ พีดับเบิลยูเอ็ม (Pulse Width Modulation: PWM)
รูปพีดับเบิลยูเอ็มควบคุมมอเตอร์
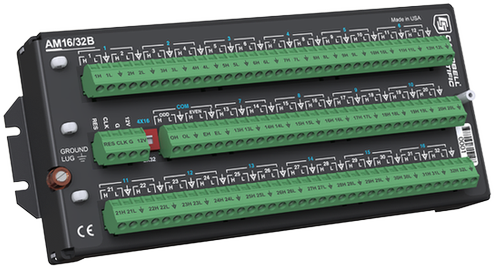
เคาเตอร์การนับแบบตามเวลาจริง หรือ อาร์ทีซี (Real-Time Counter: RTC)
รูปตัวอย่างแผงวงจรอาร์ทีซี
แสดงให้เห็นถึงเคาเตอร์ชนิดพิเศษที่ทำงานได้แม้แต่ในโหมดขณะนอนหลับ (Sleep mode) โดยมีการใช้หลักการของ อซิงโครนัส (Asynchronous: ไม่ตรงกัน) และ /หรือหลักการตรงกัน (Synchronous)
มีการเชื่อมต่อกันแบบอนุกรม (UART/USART) สามารถทำการเชื่อมต่อสื่อสารกับคอมพิวเตอร์หลัก และอาจมีการเชื่อมต่อแบบอนุกรมอื่น ๆ เช่น SPI, CAN และ I2C เพื่อทำการควบคุมชิปเฉพาะอื่น ๆ ที่ใช้ในอุปกรณ์ หรือระบบ
เกือบทุกตระกูลในไมโครคอนโทรลเลอร์ที่ถูกสร้างขึ้นมักจะมี เอดีคอนเวอร์เตอร์ (A/D converter)
รูปแสดงหลักการของชิปเอดีคอนเวอร์เตอร์
รูปผังตัวอย่างการต่อชิปของเอดีคอนเวอร์เตอร์
และมัลติเพล็กเซอร์ (multiplexer) ของขาเข้าปลายทางเดียว (Single- ended inputs)
รูปตัวอย่างของผังเกตของมัลติเพล็กเซอร์
รูปตัวอย่างมัลติเพล็กเซอร์
ช่วงของขาเข้า โดยปกติจะเป็นขั้วเดี่ยว (Unipolar) และอาจมีการจ่ายแรงดันไฟฟ้า หรืออาจไม่มีการจ่ายแรงดันไฟฟ้าบนชิป ช่วงเวลาการแปลง จะใช้หลักของการประมาณการต่อเนื่องของเอดีคอนเวอร์เตอร์ และจำนวนที่มีประสิทธิผลของบิตส์ (Effective Number Of Bits: ENOB) โดยทั่วไปจะมีค่าความละเอียด 8, 10 หรือ 12 บิตส์
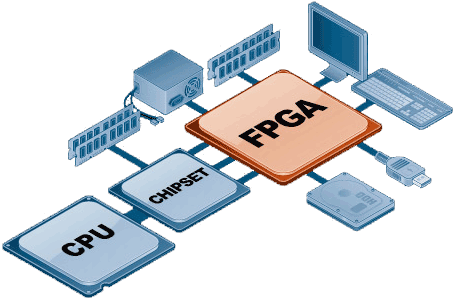
ยังมีวงจรอินเตอร์เฟสพิเศษอื่น ๆ อีก เช่น อาร์เรย์เกตโปรแกรมสนาม (Field Programmable Gate Array: FPGA) นั่นสามารถกำหนดค่าเป็นวงจรดิจิตอลแบบกำหนดเอง
รูปตัวอย่างชิปเอฟพีจีเอ
รูปสถาปัตยกรรมการเชื่อมต่อที่มีชิปเอฟพีจีเอ
เฟิร์มแวร์ไมโครคอนโทรลเลอร์ (Microcontroller firmware) มักจะเป็นโปรแกรมที่ใช้ ภาษาเอสเซมบลี (Assembly language) หรือ ภาษาซี (C language)
รูปตัวอย่างการใช้ภาษาแอสแซมบลีที่เป็นเฟิร์มแวร์ในไมโครคอนโทรลเลอร์
อีกทั้งยังมีเครื่องมือซอฟแวร์มากมาย รวมทั้งการจำลองชิป (Chip simulators) ที่มีอยู่บนเว็บไซต์ ของผู้ผลิตชิป หรือบริษัทอื่นที่มีให้บริการโดยบางผู้ให้บริการไม่เสียค่าใช้จ่าย
การบูรณาการแบบมืออาชีพ ทำให้สามารถพัฒนาสภาพแวดล้อม และฮาร์ดแวร์เพื่อแก้จุดบกพร่อง (ในวงจรจำลอง) อาจทำให้มีราคาแพงมากขึ้น (ถึงขั้นมีราคาหลายหมื่นบาท)
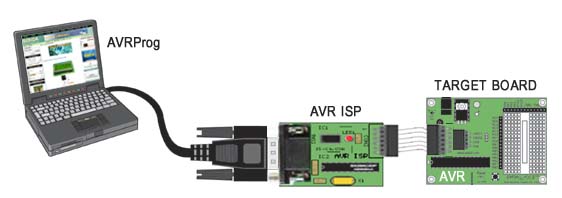
แต่ถึงอย่างไร หากมีการใช้งานอย่างฉลาด อาจจะได้ของที่มีราคาไม่แพง โดยการใช้ตัวจำลองรอมในระบบไมโครโปรเซสเซอร์ หรือมีการพัฒนาวงจรทีละขั้น โดยอาจมีการใช้โปรแกรมเมอร์ไอเอสพี ของแฟลชไมโครคอนโทรลเลอร์ จนสามารถพัฒนาเป็นโปรแกรมประยุกต์ที่ค่อนข้างซับซ้อน
รูปแนวทางตัวอย่างการแฟลชไมโครคอนโทรลเลอร์โดยการโปรแกรมไอเอสพี
รูปตัวอย่างอุปกรณ์ตัวโปรแกรมไอเอสพีเอวีอาร์
ข้อคิดดี ๆ ที่นำมาฝาก
ร่วมน้อมรำลึกถึง คำพ่อสอน เพื่อใช้เป็นแนวทางในการดำเนินชีวิต
“การทำงานด้วยความรู้ความสามารถ
ด้วยความตั้งใจ และเอาใจใส่ศึกษานั้น
เป็นการพัฒนาบุคคลให้มีคุณภาพสูงขึ้นโดยแท้
และบุคคลที่มีคุณภาพ อันพัฒนาแล้วย่อมสามารถ
จะพัฒนางานส่วนรวมของชาติ
ให้เจริญก้าวหน้าได้ดังประสงค์”
พระบรมราโชวาทของพระบาทสมเด็จพระเจ้าอยู่หัว
ในพิธีพระราชทานปริญญาบัตรวิทยาลัยเทคโนโลยี และอาชีวศึกษา ๘ กรกฎาคม ๒๕๓๐
ขอน้อมส่งพระองค์สู่สวรรคาลัย
ด้วยเกล้าด้วยกระหม่อมขอเดชะ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}