3.7.4 аєДаЄ°аєВаЄДаЄ£аЄДаЄ≠аЄЩаєВаЄЧаЄ£аЄ•аєАаЄ•аЄ≠аЄ£аєМаЄ£аЄ∞аЄЪаЄЪаєАаЄДаЄ£аЄЈаЄ≠аЄВаєИаЄ≤аЄҐ
аЄ°аЄµаЄ≠аЄµаЄБаЄ≠аЄҐаєИаЄ≤аЄЗаЄЂаЄЩаЄґаєИаЄЗаєГаЄЩаЄЂаЄ±аЄІаЄВаєЙаЄ≠аЄЧаєЙаЄ≤аЄҐ аєЖ аЄЧаЄµаєИаЄДаЄІаЄ£аЄИаЄ∞аЄБаЄ•аєИаЄ≤аЄІаЄЦаЄґаЄЗаЄ™аєИаЄІаЄЩаЄЩаЄµаєЙ аєГаЄЩаєАаЄ£аЄЈаєИаЄ≠аЄЗаЄВаЄ≠аЄЗаЄФаєЙаЄ≤аЄЩаЄВаЄ≤аєАаЄВаєЙаЄ≤ аєБаЄ•аЄ∞аЄВаЄ≤аЄ≠аЄ≠аЄБаЄ£аЄ∞аЄЪаЄЪаєБаЄ°аЄДаЄ≤аЄЧаЄ£аЄ≠аЄЩаЄіаЄБаЄ™аєМаЄ°аЄ±аЄБаЄИаЄ∞аЄЧаЄ≥аЄЗаЄ≤аЄЩаЄ£аєИаЄІаЄ°аЄБаЄ±аЄЪаЄ£аЄ∞аЄЪаЄЪаЄ≠аЄЈаєИаЄЩ аєЖ аєГаЄЩаєАаЄДаЄ£аЄЈаЄ≠аЄВаєИаЄ≤аЄҐ
аЄВаєЙаЄ≠аЄ°аЄєаЄ• аєБаЄ•аЄ∞аЄДаЄ≥аЄ™аЄ±аєИаЄЗаЄИаЄ∞аЄЦаЄєаЄБаЄ™аєИаЄЗаЄИаЄ≤аЄБаЄ£аЄ∞аЄЪаЄЪаЄЂаЄЩаЄґаєИаЄЗаєДаЄЫаЄҐаЄ±аЄЗаЄ≠аЄµаЄБаЄ£аЄ∞аЄЪаЄЪаЄ≠аЄЈаєИаЄЩ аєЖ аЄВаЄУаЄ∞аЄЧаЄµаєИаЄ°аЄµ аєВаЄЫаЄ£аєВаЄХаЄ£аЄДаЄ≠аЄ• (Protocols) аєБаЄХаЄБаЄХаєИаЄ≤аЄЗаЄБаЄ±аЄЩ аЄ°аЄµаЄБаЄ≤аЄ£аєГаЄКаєЙаЄЗаЄ≤аЄЩаЄЧаЄ±аєЙаЄЗаєБаЄЪаЄЪаєАаЄЫаЄіаЄФаєГаЄЂаєЙаєГаЄКаєЙаЄБаЄІаєЙаЄ≤аЄЗаЄВаЄІаЄ≤аЄЗаЄВаЄ≠аЄЗаЄЯаЄ£аЄµ аєБаЄ•аЄ∞аєБаЄЪаЄЪаЄ°аЄµаЄ•аЄіаЄВаЄ™аЄіаЄЧаЄШаЄіаєМ аЄЧаЄµаєИаЄИаЄ∞аЄБаЄ•аєИаЄ≤аЄІаєАаЄБаЄµаєИаЄҐаЄІаЄБаЄ±аЄЪаєАаЄДаЄ£аЄЈаЄ≠аЄВаєИаЄ≤аЄҐаєАаЄЂаЄ•аєИаЄ≤аЄЩаЄµаєЙ аєАаЄЮаЄ£аЄ≤аЄ∞аЄЧаЄ±аєЙаЄЗаЄ™аЄ≠аЄЗаєАаЄЂаЄ•аєИаЄ≤аЄЩаЄµаєЙаЄИаЄ∞аЄХаЄ≠аЄЪаЄ™аЄЩаЄ≠аЄЗаЄХаєИаЄ≠аЄІаЄ±аЄХаЄЦаЄЄаЄЫаЄ£аЄ∞аЄ™аЄЗаЄДаєМаЄЧаЄµаєИаЄЩаЄ≥аєДаЄЫаєГаЄКаєЙаЄЗаЄ≤аЄЩ
аЄ≠аЄ±аЄЩаЄФаЄ±аЄЪаєБаЄ£аЄБаЄДаЄЈаЄ≠аєВаЄЫаЄ£аєВаЄХаЄ£аЄДаЄ≠аЄ•аЄБаЄ≤аЄ£аЄЬаЄ•аЄіаЄХаЄ≠аЄ±аЄХаєВаЄЩаЄ°аЄ±аЄХаЄі (Manufacturing Automation
Protocol: MAP)
аЄ£аЄєаЄЫаЄХаЄ±аЄІаЄ≠аЄҐаєИаЄ≤аЄЗаєАаЄ≠аєЗаЄ°аєАаЄ≠аЄЮаЄµ
аєБаЄЩаЄ∞аЄЩаЄ≥аєАаЄЮаЄЈаєИаЄ≠аєГаЄЂаєЙаЄ≠аєИаЄ≤аЄЩаєДаЄФаєЙаЄХаєИаЄ≠аєАаЄЩаЄЈаєИаЄ≠аЄЗаєГаЄЂаєЙ аЄДаЄ•аЄіаЄБаЄВаЄІаЄ≤аєАаЄ•аЄЈаЄ≠аЄБ Open link in new window
аЄЛаЄґаєИаЄЗаєДаЄФаєЙаЄЦаЄєаЄБаЄЮаЄ±аЄТаЄЩаЄ≤аєВаЄФаЄҐаЄЪаЄ£аЄіаЄ©аЄ±аЄЧаєАаЄИаЄЩаєАаЄЩаЄ≠аЄ£аЄ±аЄ•аЄ°аЄ≠аєАаЄХаЄ≠аЄ£аєМ аЄ£аЄ∞аЄЪаЄЪаЄЩаЄµаєЙаЄВаЄґаєЙаЄЩаЄ≠аЄҐаЄєаєИаЄБаЄ±аЄЪ аЄБаЄ≤аЄ£аЄИаЄ≥аЄ•аЄ≠аЄЗаЄ£аЄ∞аЄЪаЄЪаєАаЄЫаЄіаЄФаєАаЄКаЄЈаєИаЄ≠аЄ°аєВаЄДаЄ£аЄЗаЄВаєИаЄ≤аЄҐаєДаЄ≠аєАаЄ≠аЄ™аєВаЄ≠ (Open Systems Interconnection: OSI) аЄЦаЄєаЄБаЄ≠аЄ≠аЄБаєБаЄЪаЄЪаЄ°аЄ≤аєГаЄКаєЙаЄЗаЄ≤аЄЩ аєВаЄФаЄҐаєАаЄЙаЄЮаЄ≤аЄ∞аЄ≠аЄҐаєИаЄ≤аЄЗаЄҐаЄіаєИаЄЗ аЄБаЄ≤аЄ£аЄЪаЄєаЄ£аЄУаЄ≤аЄБаЄ≤аЄ£аЄДаЄ≠аЄ°аЄЮаЄіаЄІаєАаЄХаЄ≠аЄ£аєМаЄКаєИаЄІаЄҐаєГаЄЩаЄБаЄ≤аЄ£аЄЬаЄ•аЄіаЄХ аЄЂаЄ£аЄЈаЄ≠аЄЛаЄіаЄ° (Computer Integrated Manufacturing: CIM) аєБаЄ•аЄ∞аЄЮаЄµаєБаЄ≠аЄ•аЄЛаЄµ
аЄ£аЄєаЄЫаЄХаЄ±аЄІаЄ≠аЄҐаєИаЄ≤аЄЗаЄ£аЄ∞аЄЪаЄЪаЄЛаЄіаЄ°
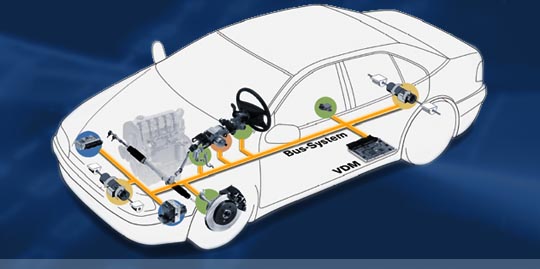
аЄ≠аЄ±аЄЩаЄФаЄ±аЄЪаЄЧаЄµаєИаЄ™аЄ≠аЄЗ аєАаЄДаЄ£аЄЈаЄ≠аЄВаєИаЄ≤аЄҐаЄЮаЄЈаєЙаЄЩаЄЧаЄµаєИаЄДаЄІаЄЪаЄДаЄЄаЄ° аЄЂаЄ£аЄЈаЄ≠аєБаЄДаЄЩаЄЪаЄ±аЄ™ (Controller Area Network: CAN) аєАаЄЫаєЗаЄЩаЄ°аЄ≤аЄХаЄ£аЄРаЄ≤аЄЩаЄ™аЄ≥аЄЂаЄ£аЄ±аЄЪаЄБаЄ≤аЄ£аЄ™аЄЈаєИаЄ≠аЄ™аЄ≤аЄ£аєБаЄЪаЄЪаЄ≠аЄЩаЄЄаЄБаЄ£аЄ°аЄЛаЄґаєИаЄЗаЄЮаЄ±аЄТаЄЩаЄ≤аєВаЄФаЄҐ аєВаЄ£аєАаЄЪаЄіаЄ£аєМаЄХ аЄЪаєКаЄ≠аЄЛ (Robert Bosch GmbH) аєАаЄЫаєЗаЄЩаЄ£аЄ∞аЄЪаЄЪаЄЭаЄ±аЄЗаЄХаЄ±аЄІаЄЧаЄµаєИаЄ°аЄµаєГаЄКаєЙаЄ≠аЄҐаЄєаєИаєГаЄЩаЄҐаЄ≤аЄЩаЄҐаЄЩаЄХаєМаЄ™аЄ°аЄ±аЄҐаєГаЄЂаЄ°аєИ
аЄ£аЄєаЄЫаєБаЄДаЄЩаЄЪаЄ±аЄ™ аЄЂаЄ£аЄЈаЄ≠аєАаЄДаЄ£аЄЈаЄ≠аЄВаєИаЄ≤аЄҐаЄЮаЄЈаєЙаЄЩаЄЧаЄµаєИаЄДаЄІаЄЪаЄДаЄЄаЄ°аЄЧаЄµаєИаєГаЄКаєЙаєГаЄЩаЄҐаЄ≤аЄЩаЄҐаЄЩаЄХаєМ
аЄ£аЄєаЄЫаєБаЄДаЄЩаЄЪаЄ±аЄ™
аЄВаєЙаЄ≠аЄДаЄіаЄФаЄФаЄµ аєЖ аЄЧаЄµаєИаЄЩаЄ≥аЄ°аЄ≤аЄЭаЄ≤аЄБ
аЄВаЄ≠аЄ≠аЄ±аЄНаєАаЄКаЄіаЄНаЄЮаЄ£аЄ∞аЄЪаЄ£аЄ°аЄ£аЄ≤аєВаЄКаЄІаЄ≤аЄЧ
аЄВаЄ≠аЄЗаЄЮаЄ£аЄ∞аЄЪаЄ≤аЄЧаЄ™аЄ°аєАаЄФаєЗаЄИаЄЮаЄ£аЄ∞аєАаЄИаєЙаЄ≤аЄ≠аЄҐаЄєаєИаЄЂаЄ±аЄІ
“аєАаЄ®аЄ£аЄ©аЄРаЄБаЄіаЄИаЄЮаЄ≠аєАаЄЮаЄµаЄҐаЄЗаєАаЄЫаєЗаЄЩаєАаЄ™аЄ°аЄЈаЄ≠аЄЩаЄ£аЄ≤аЄБаЄРаЄ≤аЄЩаЄВаЄ≠аЄЗаЄКаЄµаЄІаЄіаЄХ
аЄ£аЄ≤аЄБаЄРаЄ≤аЄЩаЄДаЄІаЄ≤аЄ°аЄ°аЄ±аєИаЄЩаЄДаЄЗаЄВаЄ≠аЄЗаєБаЄЬаєИаЄЩаЄФаЄіаЄЩ аєАаЄЫаЄ£аЄµаЄҐаЄЪаєАаЄ™аЄ°аЄЈаЄ≠аЄЩаєАаЄ™аЄ≤аєАаЄВаєЗаЄ°
аЄЧаЄµаєИаЄЦаЄєаЄБаЄХаЄ≠аЄБаЄ£аЄ≠аЄЗаЄ£аЄ±аЄЪаЄЪаєЙаЄ≤аЄЩаєАаЄ£аЄЈаЄ≠аЄЩаЄХаЄ±аЄІаЄ≠аЄ≤аЄДаЄ≤аЄ£аєДаЄІаєЙаЄЩаЄ±аєИаЄЩаєАаЄ≠аЄЗ аЄ™аЄіаєИаЄЗаЄБаєИаЄ≠аЄ™аЄ£аєЙаЄ≤аЄЗаЄИаЄ∞аЄ°аЄ±аєИаЄЩаЄДаЄЗаєДаЄФаєЙаЄБаєЗаЄ≠аЄҐаЄєаєИаЄЧаЄµаєИаєАаЄ™аЄ≤аєАаЄВаєЗаЄ°
аєБаЄХаєИаЄДаЄЩаЄ™аєИаЄІаЄЩаЄ°аЄ≤аЄБаЄ°аЄ≠аЄЗаєДаЄ°аєИаєАаЄЂаєЗаЄЩаєАаЄ™аЄ≤аєАаЄВаєЗаЄ°аєБаЄ•аЄ∞аЄ•аЄЈаЄ°аєАаЄ™аЄ≤аєАаЄВаєЗаЄ°аєАаЄ™аЄµаЄҐаЄФаєЙаЄІаЄҐаЄЛаєЙаЄ≥аєДаЄЫ”
аЄЮаЄ£аЄ∞аЄ£аЄ≤аЄКаЄФаЄ≥аЄ£аЄ±аЄ™аЄВаЄ≠аЄЗаЄЮаЄ£аЄ∞аЄЪаЄ≤аЄЧаЄ™аЄ°аєАаЄФаєЗаЄИаЄЮаЄ£аЄ∞аєАаЄИаєЙаЄ≤аЄ≠аЄҐаЄєаєИаЄЂаЄ±аЄІ аЄИаЄ≤аЄБаЄІаЄ≤аЄ£аЄ™аЄ≤аЄ£аЄКаЄ±аЄҐаЄЮаЄ±аЄТаЄЩаЄ≤аЄЫаЄ£аЄ∞аЄИаЄ≥аєАаЄФаЄЈаЄ≠аЄЩаЄ™аЄіаЄЗаЄЂаЄ≤аЄДаЄ° аєТаєХаєФаєТ
{kind=link}
{kind=link}
{kind=link}
{kind=link}