3.7 การควบคุมไมโครโปรเซสเซอร์ขาเข้า ขาออก
3.7.1 การโพลลิ่ง และการรบกวน
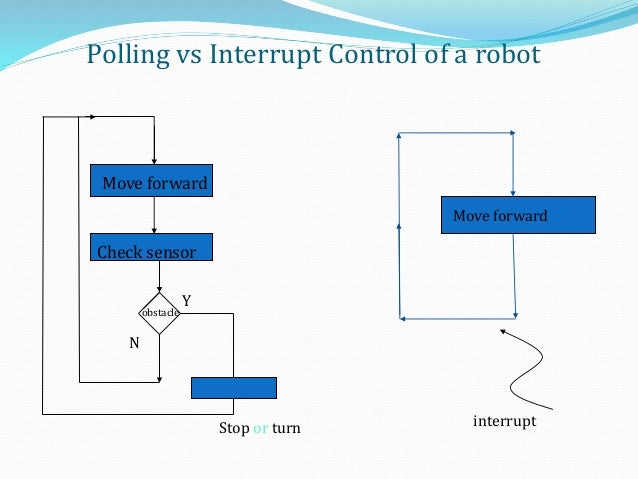
มีวิธีการพื้นฐานสองวิธีสำหรับตัวไมโครโปรเซสเซอร์ เพื่อควบคุมขาเข้า และขาออก ก็คือวิธีการที่เรียกว่า การโพลลิ่ง (Polling) และการรบกวน (Interrupts)
รูปแผนภาพการไหลพื้นฐานของงานที่ใช้ไมโครโปรเซสเซอร์เพื่อควบคุมหุ่นยนต์
แนะนำเพื่อให้อ่านได้ต่อเนื่องให้ คลิกขวาเลือก Open link in new window
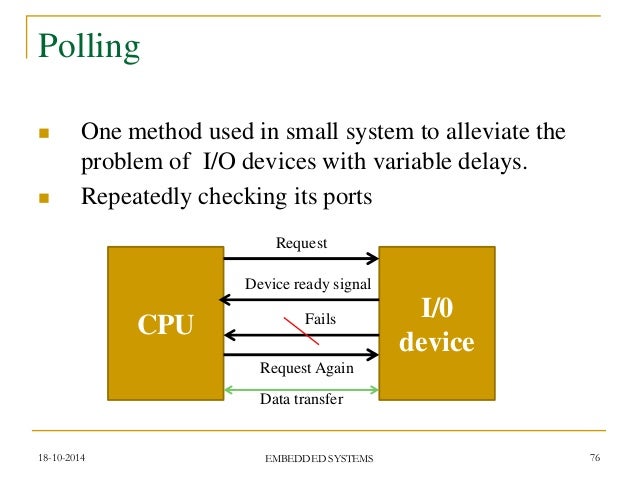
การโพลลิ่งที่เหมาะสม ได้จากการที่ไมโครโปรเซสเซอร์ตรวจสอบการทำงานเป็นช่วง ๆ ในอุปกรณ์ต่อพ่วงที่มากมาย เพื่อนำมาคำนวณ ถ้าขาเข้า หรือขาออกต้องถูกให้รอคอย เพราะหากอุปกรณ์ที่กำลังต่อพ่วงบางครั้งจะมีขาเข้า หรือขาออกปริมาณมากแค่ไหนนั่น ก็ขึ้นอยู่กับกระบวนการ
รูปการโพลลิ่ง
ค่าสถานะของสัญญาณจะถูกตั้งค่า ปัญหานั่นมักมาจากกระบวนการในเรื่องของเวลา เพื่อเป็นการตรวจสอบของเสียสำหรับขาเข้า เมื่อพวกมันไม่เกิดการเปลี่ยนแปลง
การให้เกิดการขัดจังหวะ (Servicing an interrupt) สัญญาณ เป็นเรื่องของ วิธีการเลือก (Alternative method) เพื่อใช้ควบคุมขาเข้า และขาออก ในวิธีการนี้ รีจีสเตอร์ในไมโครโปรเซสเซอร์ต้องมีการตั้งค่าขัดจังหวะเปิดใช้งาน (Interrupt Enable: IE) โดยเฉพาะอย่างยิ่งสำหรับอุปกรณ์ต่อพ่วง
รูปการรบกวนในอุปกรณ์ต่อพ่วง
เมื่อมีการขัดจังหวะเริ่มขึ้นโดยอุปกรณ์ต่อพ่วงที่เพิ่มเข้ามา ไมโครโปรเซสเซอร์จะกำหนดค่าสถานะเพื่อ การร้องขอขัดจังหวะ (Interrupt ReQuest: IRQ) จะนำไปใช้งาน และไมโครโปรเซสเซอร์จะทำให้เกิดการขัดจังหวะ
รูปอุปกรณ์ต่าง ๆ ที่ต่อพ่วงเพื่อให้ไมโครโปรเซสเซอร์ร้องขอขัดจังหวะ
การให้เกิดการขัดจังหวะ หมายถึง กระบวนการประมวลผลของไมโครโปรเซสเซอร์ในขณะที่ทำงานโดยปกติ แล้วถูกหยุดลง ก็คือการขัดจังหวะนั่นเอง ในขณะที่ทำเรื่องขาเข้า / ขาออกเรียบร้อยแล้ว
เพื่อที่จะให้กลับมาทำการประมวลผลตามปกติ ไมโครโปรเซสเซอร์มีความจำเป็นต่อการจัดเก็บเนื้อหาของการรีจีสเตอร์ ก่อนที่จะเกิดการขัดจังหวะขึ้น กระบวนการนี้รวมไปถึงการบันทึกทั้งหมดที่มีการกำหนดรีจีสเตอร์เป็นกลุ่ม (Stack), บางส่วนของแรม เพื่อการนี้ เรียกกระบวนการนี้ว่า การผลักดัน (Push)
หลังจากการผลักดัน ไมโครโปรเซสเซอร์สามารถโหลดที่อยู่ของการขัดจังหวะไว้เป็นประจำ และทำสำเร็จทั้งในด้านขาเข้า / ขาออก เมื่อส่วนของรหัสได้ทำเสร็จสมบูรณ์แล้ว เนื้อหาของกลุ่มที่มีการโหลดรีจีสเตอร์ขึ้นมาใหม่ ในการทำงานแบบนี้ รู้จักกันในชื่อว่า การป๊อบ หรือการดึง (Pop or Pull) ทำให้เกิดการดำเนินการประมวลผลตามปกติ
ข้อคิดดี ๆ ที่นำมาฝาก
“คนรวยที่ไม่รู้จักพอ
ก็เป็นคนจนอยู่ตลอดเวลา
คนที่รู้จักพอ
ก็เป็นคนมั่งมีอยู่ตลอดเวลา”
สมเด็จพระญาณสังวร
| {kind=link}
{kind=link}
{kind=link}
{kind=link}