3.5 เธเธงเธเธเธธเธกเธเนเธงเธขเนเธกเนเธเธฃเนเธเธฃเนเธเธชเนเธเธญเธฃเน
3.5.1 เธเธฒเธฃเธเธงเธเธเธธเธกเธเนเธงเธข เธเธตเนเธญเธเธต
เธฃเธฐเธเธเธเธงเธเธเธธเธกเนเธเธเธงเธเธฃเธญเธเธเธดเธ เนเธเนเธเธชเธดเนเธเธซเธเธถเนเธเธเธตเนเธเธฐเธเธณเธซเธเธเธเธงเธฒเธกเนเธเธเธเนเธฒเธเนเธเธชเธ เธฒเธเธเธตเนเธเนเธญเธเธเธฒเธฃ เธเธฑเธเธเธงเธฒเธกเธเธดเธเธเธเธเธด (Error) เธเธตเนเนเธเธดเธเธเธถเนเธเธเธฃเธดเธ เนเธฅเธฐเธชเธฃเนเธฒเธเธเธณเธชเธฑเนเธเธเธงเธเธเธธเธกเธเธฒเธฃเนเธเนเนเธเธเธงเธฒเธกเธเธดเธเธเธฅเธฒเธเธเธดเธเธเธเธเธดเธเธตเน
เธฃเธนเธเธเธฑเธเธเธฒเธฃเธเธงเธเธเธธเธกเธเธตเนเธญเธเธต
เนเธเธฐเธเธณเนเธเธทเนเธญเนเธซเนเธญเนเธฒเธเนเธเนเธเนเธญเนเธเธทเนเธญเธเนเธซเน เธเธฅเธดเธเธเธงเธฒเนเธฅเธทเธญเธ Open link in new window
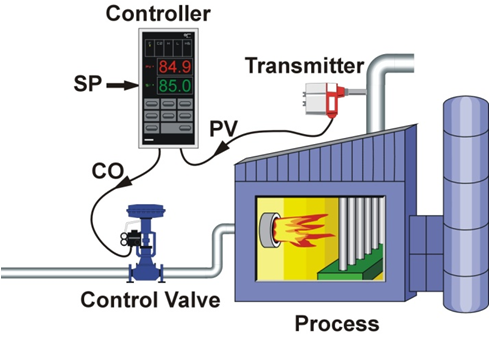
เธเธฒเธฃเธเธงเธเธเธธเธกเธเนเธงเธขเธชเธฑเธเธชเนเธงเธ เธเธฃเธดเธเธฑเธเธเน เธญเธเธธเธเธฑเธเธเน เธซเธฃเธทเธญเธเธตเนเธญเธเธต (Proportional–Integral–Derivative controller: PID) เนเธชเธเธเนเธซเนเนเธซเนเธเธชเธฒเธกเธงเธดเธเธตเนเธเธเธฒเธฃเธกเธญเธเธเธงเธฒเธกเธเธดเธเธเธเธเธด เนเธฅเธฐเนเธเธทเนเธญเธเธฒเธฃเนเธเนเนเธเนเธเธเธงเธฒเธกเธเธดเธเธเธเธเธดเธเธฑเนเธ
เธเธณเนเธฃเธเธเธทเธญ P เธเธญเธ เธเธตเนเธญเธเธต เธเธทเธญ เธชเธฑเธเธชเนเธงเธ (Proportional) เธเธณเธเธตเนเธซเธกเธฒเธขเธเธถเธ เธเธฒเธฃเธเธณเนเธเธดเธเธเธฒเธฃเธเธงเธเธเธธเธกเธเธตเนเธเธณเนเธเธขเนเธเนเนเธกเนเธเธฃเธเธญเธเนเธเธฃเธฅเนเธฅเธญเธฃเน เนเธเนเธเธชเธฑเธเธชเนเธงเธเธเนเธญเธเธงเธฒเธกเธเธดเธเธเธเธเธด เธซเธฃเธทเธญเธเธฅเนเธฒเธงเธญเธตเธเธเธฑเธขเธซเธเธถเนเธ เธเธงเธฒเธกเธเธดเธเธเธเธเธดเธเธตเนเธกเธตเธเนเธฒเธกเธฒเธเธเธถเนเธ เธเนเธเธฃเนเธญเธกเธเธตเนเธเธฐเธกเธตเธเธฒเธฃเนเธเนเนเธเธเธตเนเนเธเธดเนเธกเธเธถเนเธ
I เนเธเธเธตเนเธญเธเธต เธเธทเธญ เธเธฃเธดเธเธฑเธเธเน (Integral) เธเธญเธเธเนเธญเธเธดเธเธเธเธเธด เนเธกเธทเนเธญเนเธงเธฅเธฒเธเนเธฒเธเนเธ เธเธเธเธถเธเธฃเธฐเธขเธฐเธเธตเนเธชเธณเธเธฑเธเธเนเธฒเธซเธเธถเนเธ เธเธฐเนเธเธดเธเธเธฒเธฃเธชเธฃเนเธฒเธเธเธดเธเธฒเธฃเธเธฒเธเธฒเธฃเนเธเนเนเธเธเนเธญเธเธดเธเธเธฅเธฒเธเธเธฒเธกเนเธงเธฅเธฒเธเธตเนเนเธเนเธฃเธฑเธเนเธเธเธฑเธเธเธธเธเธฑเธ เนเธเนเธเนเธฒเนเธเธดเธเนเธงเธฅเธฒเธเธตเนเธเนเธญเธเนเธเนเนเธเธเธฒเธกเธเธตเนเธฃเธฐเธเธธเนเธงเน เธเธฐเนเธเธดเธเธเธงเธฒเธกเธเธดเธเธเธเธเธดเธเธตเนเธขเธฒเธงเธเธฒเธเธเนเธญเนเธเธทเนเธญเธ เธเธฒเธฃเนเธเนเนเธเธเนเธเธฐเธขเธฒเธเธเธงเนเธฒ
เธชเธธเธเธเนเธฒเธข D เนเธเธเธตเนเธญเธเธต เธขเนเธญเธกเธฒเธเธฒเธเธเธณเธงเนเธฒ เธญเธเธธเธเธฑเธเธเน (Derivative) เธเธณเธงเนเธฒเธญเธเธธเธเธฑเธเธเน เธเธทเธญเธเธฒเธฃเธเธณเนเธเธดเธเธเธฒเธฃเนเธเนเนเธเนเธเธตเนเธขเธงเธเธฑเธเธญเธเธธเธเธฑเธเธเนเธเธตเนเธชเธฑเธกเธเธฑเธเธเนเธเธฑเธ เธซเธฃเธทเธญเธเธฒเธฃเนเธเธฅเธตเนเธขเธเนเธเธฅเธเธเธญเธเธเธงเธฒเธกเธเธดเธเธเธเธเธดเธเธตเนเนเธเธตเนเธขเธงเธเธฑเธเนเธงเธฅเธฒ เธเธฅเนเธฒเธงเธญเธตเธเธเธฑเธขเธซเธเธถเนเธ เธเธงเธฒเธกเธเธดเธเธเธเธเธดเธเธฐเนเธเธฅเธตเนเธขเธเนเธเธฅเธเนเธเธญเธขเนเธฒเธเธฃเธงเธเนเธฃเนเธง เธเธณเนเธซเนเนเธเธดเธเธเธฒเธฃเนเธเนเนเธเธเธตเนเธกเธฒเธเธเธงเนเธฒ
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธเธฒเธฃเธเธงเธเธเธธเธกเนเธเธเธเธตเนเธญเธเธต
เธฃเธฐเธเธเธเธงเธเธเธธเธกเธชเธฒเธกเธฒเธฃเธเธเธณ เธเธต, เธเธตเนเธญ, เธเธตเธเธต เธซเธฃเธทเธญเธเธตเนเธญเธเธต เธกเธฒเนเธเนเนเธเธเธฒเธฃเธชเธฃเนเธฒเธเนเธเธทเนเธญเธเธฒเธฃเนเธเนเนเธเธเธฑเธเธซเธฒ เนเธเธขเธเธฑเนเธงเนเธเธเนเธเธทเธญ เธเธฒเธฃเธเธนเธเธเธฃเธฑเธ (Tuning) เนเธเธขเธเธฒเธฃเนเธฅเธทเธญเธเธฃเธฐเธเธเธเธตเนเธกเธตเธเนเธฒเนเธซเธกเธฒเธฐเธชเธก เนเธซเนเธญเธขเธนเนเนเธเธเนเธญเธเธณเธซเธเธเนเธซเธฅเนเธฒเธเธตเน เธชเนเธงเธเธฃเธฒเธขเธฅเธฐเนเธญเธตเธขเธเธเธฐเนเธเนเธเธฅเนเธฒเธงเธเธถเธเนเธเนเธฃเธทเนเธญเธ เธเธฒเธฃเธญเธญเธเนเธเธเธเธงเธเธเธธเธก เนเธเธเธเธเธตเน 31
3.5.2 เธเธฒเธฃเธเธงเธเธเธธเธกเนเธเธดเธเธเธฃเธฃเธเธฐ
เธเธฒเธฃเธจเธถเธเธฉเธฒเธเธฒเธฃเธเธงเธเธเธธเธกเธเธฒเธเนเธกเธเธฒเธเธฃเธญเธเธดเธเธชเน เธเธงเธฃเธเธฐเนเธฃเธดเนเธกเธเนเธเนเธเนเธเธญเธฑเธเธเธฑเธเนเธฃเธเธเนเธเธทเธญเธซเธฑเธงเธเนเธญเธเธตเน เนเธเธทเนเธญเนเธเนเธญเธเธดเธเธฒเธขเธฃเธฐเธเธเธเธฒเธฃเธเธงเธเธเธธเธก เนเธฅเธฐเธเธฒเธฃเธเธงเธเธเธธเธกเธเนเธงเธขเนเธกเนเธเธฃเนเธเธฃเนเธเธชเนเธเธญเธฃเน เธเธฑเนเธเธเนเธเธทเธญ เธเธฒเธฃเนเธฃเธตเธขเธเธฃเธนเนเนเธเธตเนเธขเธงเธเธฑเธ เธเธฒเธฃเธเธงเธเธเธธเธกเนเธเธดเธเธเธฃเธฃเธเธฐ เธซเธฃเธทเธญเธเธตเนเธญเธฅเธเธต (Programmable Logic Controller: PLC)
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธญเธธเธเธเธฃเธเนเธเธตเนเธญเธฅเธเธต
เธเธตเนเธญเธฅเธเธต เธเธฐเธชเธฒเธกเธฒเธฃเธเธเธณเธเธงเธฒเธกเนเธเนเธฒเนเธเนเธเนเธเนเธฒเธขเธเธงเนเธฒ เนเธกเนเธเธฃเธเธญเธเนเธเธฃเธฅเนเธฅเธญเธฃเนเธเธตเนเธกเธตเธเธงเธฒเธกเธเธเนเธเธตเนเธขเธงเนเธเธเธฒเธฃเธญเธญเธเนเธเธ เธชเธณเธซเธฃเธฑเธเธเธฒเธฃเธเธณเนเธเนเธเนเธเธฒเธเนเธเธเธฒเธเธเธเธดเธเธฑเธเธด เธเธฒเธฃเธเนเธญเธเธเนเธญเธกเธนเธฅเธกเธฑเธเธกเธฒเธเธฒเธเนเธเนเธชเธงเธดเธเธเน เนเธเนเธ เธเธธเนเธกเธเธ เนเธเธทเนเธญเธเธณเธกเธฒเนเธเนเธเธงเธเธเธธเธกเธเธฒเธฃเธเธณเธเธฒเธเธเธญเธเนเธเธฃเธทเนเธญเธเธเธฑเธเธฃเธเธฅ เธซเธฃเธทเธญเนเธเนเธเนเธเธญเธฃเนเธเธฒเธกเธเธธเธเธเธณเนเธซเธเนเธเธเนเธฒเธ เน
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธเธฒเธฃเนเธเนเธเธญเธเนเธงเธฃเนเธเธงเธเธเธธเธกเธเธตเนเธญเธฅเธเธต
เธเธฑเธงเธเธฑเนเธเนเธงเธฅเธฒ (Timer) เธชเธฒเธกเธฒเธฃเธเธเธณเธเธฒเธฃเนเธเธฃเนเธเธฃเธกเนเธเธเธตเนเธญเธฅเธเธตเนเธเน เนเธเธทเนเธญเนเธซเนเนเธเธดเธเธเธฒเธฃเธเธณเธเธฒเธเนเธเธเธฃเธฐเธเธงเธเธเธฒเธฃเนเธเธขเนเธเธเธฒเธฐ เธเธฒเธกเธเธณเธเธงเธเธเธญเธเธเธฒเธฃเธเธฑเนเธเนเธงเธฅเธฒ เธชเนเธงเธเธเธฒเธญเธญเธเธเธฒเธเธเธฒเธฃเนเธเนเธเธฒเธ เธเธฑเธงเธญเธขเนเธฒเธเธเธฐเธเธฃเธฐเธเธญเธเนเธเธเนเธงเธข เธซเธฅเธญเธเนเธ, เนเธเธฅเธดเธเธญเธขเธเนเธงเธฒเธฅเนเธง เนเธฅเธฐเธกเธญเนเธเธญเธฃเน เธกเธตเธเธฒเธฃเธเธณเธเธฒเธเธเนเธงเธขเธเธฒเนเธเนเธฒ-เธเธฒเธญเธญเธ เธเธตเนเนเธเธทเนเธญเธกเธเนเธญเธเธฑเธเธเธณเนเธเนเธเธฒเธเธเธฒเธฃเธเธงเธเธเธธเธก
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธเธตเนเธเธณเธเธตเนเธญเธฅเธเธตเนเธเธเธงเธเธเธธเธกเธญเธธเธเธเธฃเธเนเธเนเธฒเธ เน
เธ เธฒเธฉเธฒเธเธตเนเนเธเนเนเธเธเธฒเธฃเนเธเธฃเนเธเธฃเธกเธเธตเนเนเธเนเธเธฑเธเธเธตเนเธญเธฅเธเธตเธญเธขเนเธฒเธเธเนเธฒเธข เนเธฃเธตเธขเธเธงเนเธฒ เธเธฃเธฃเธเธฐเธเธฑเนเธเธเธฑเธเนเธ (Ladder logic) เธซเธฃเธทเธญเธเธฒเธฃเนเธเธฃเนเธเธฃเธกเนเธเธเธเธฑเนเธเธเธฑเธเนเธ (Ladder programming) เธเธฃเธฃเธเธฐเธเธฑเนเธเธเธฑเธเนเธเนเธเนเธเธ เธฒเธฉเธฒเธเธฒเธเธเธฃเธฒเธเธดเธเธเธตเนเนเธชเธเธเธเธฒเธเธเธฃเธฃเธเธฐเธเธตเนเธกเธตเธเธฒเธฃเธเธชเธกเธเธชเธฒเธเธฃเธงเธกเธเธฑเธเธเธญเธเธเธฅเนเธญเธเนเธเธ เธญเธเธธเธเธฃเธก (AND) เนเธฅเธฐเนเธเธ เธเธเธฒเธ (OR) เธชเนเธงเธเธฃเธฒเธขเธฅเธฐเนเธญเธตเธขเธเธเธตเนเธกเธฒเธเธเธงเนเธฒเธเธตเน เธเธฐเนเธเนเนเธฃเธตเธขเธเธฃเธนเนเนเธเธเธเธเธตเน 43
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธเธฒเธฃเธเธงเธเธเธธเธกเนเธเธเธเธฑเนเธเธเธฑเธเนเธ
3.5.3 เนเธกเนเธเธฃเนเธเธฃเนเธเธชเนเธเธญเธฃเน
เธฃเธฒเธขเธฅเธฐเนเธญเธตเธขเธเธเธญเธเนเธกเนเธเธฃเนเธเธฃเนเธเธชเนเธเธญเธฃเนเธกเธตเธกเธฒเธเธกเธฒเธข เนเธฅเธฐเธเธฐเนเธเนเนเธฃเธตเธขเธเธฃเธนเนเนเธเธซเธฑเธงเธเนเธญเธเธตเน 5.8 เนเธเธชเนเธงเธเธเธตเน เธเธฐเธเธณเธเธฒเธฃเธญเธเธดเธเธฒเธขเธเธฃเนเธฒเธง เน เธเธญเธเนเธกเนเธเธฃเนเธเธฃเนเธเธชเนเธเธญเธฃเน เนเธฅเธฐเธเธฒเธฃเธเธงเธเธเธธเธก เนเธฃเธฒเธเธณเนเธเนเธเธเธตเนเธเธฐเธเธฅเนเธฒเธงเธเธถเธเธเธญเธชเธฑเธเนเธเธเนเธเธทเนเธญเนเธเนเธฒเนเธเนเธเธเธดเนเธเธชเนเธงเธเนเธเธเธฒเธเธชเธเธฒเธเธฑเธเธขเธเธฃเธฃเธกเธเธญเธเธเธญเธกเธเธดเธงเนเธเธญเธฃเน
เธฃเธนเธเนเธฃเธก
เธเธฒเธฃเนเธเนเธฒเธเธถเธเธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเนเธเธเธชเธธเนเธก เธซเธฃเธทเธญเนเธฃเธก (Random Access Memory: RAM) เนเธเนเธเธชเนเธงเธเธซเธเธถเนเธเธเธญเธเธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเธเธญเธเธเธญเธกเธเธดเธงเนเธเธญเธฃเน เนเธเธทเนเธญเนเธเนเธชเธณเธซเธฃเธฑเธเธเธฑเธเนเธเนเธเธเธงเธฒเธกเธเธณเธเธฑเนเธงเธเธฃเธฒเธง เธเธณเธเธฒเธเนเธเนเธญเธขเนเธฒเธเธฃเธงเธเนเธฃเนเธง เธขเธเธเธฑเธงเธญเธขเนเธฒเธเนเธเนเธ เนเธกเธทเนเธญเนเธฃเธฒเธเธณเธเธฒเธเธเธฑเธเธเธญเธกเธเธดเธงเนเธเธญเธฃเนเธเธฒเธฃเธเธดเธกเธเนเธเธฒเธ เธเนเธญเธเธเธณเธชเธฑเนเธ เธเธฐเธกเธตเธเนเธญเธกเธนเธฅเธญเธขเธนเน เธเนเธญเธกเธนเธฅเนเธซเธฅเนเธฒเธเธตเนเธเธฐเนเธเนเธเนเธเนเธเธเธตเนเนเธฃเธกเธเนเธญเธ เธเนเธญเธเธเธตเนเธเธฐเนเธเธชเธนเนเธชเนเธงเธเธเธฑเธเนเธเนเธเธญเธทเนเธ เน เธเนเธฒเธเธเธฐเนเธเนเธเธฒเธเนเธเธเนเธฒเนเธเธดเธเธเธฑเธ เธเธเธเธญเธกเธเธดเธงเนเธเธญเธฃเนเธเธฑเธเนเธเธเนเธงเธข เธเนเธญเธกเธนเธฅเนเธซเธฅเนเธฒเธเธตเนเธเธฐเธชเธนเธเธซเธฒเธขเนเธ
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธฃเธญเธก
เธฃเธนเธเธฃเธญเธก เธเธฑเธเนเธฃเธก
เธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเธญเนเธฒเธเธญเธขเนเธฒเธเนเธเธตเธขเธง เธซเธฃเธทเธญเธฃเธญเธก (Read Only Memory: ROM) เนเธเนเธเธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเนเธเธเธเธเธเธตเน เธกเธตเนเธเธฃเนเธเธฃเธกเธเธทเนเธเธเธฒเธเนเธเธทเนเธญเนเธฃเธตเธขเธเนเธเนเธเธณเธชเธฑเนเธเนเธเนเธกเนเธเธฃเธเธญเธเนเธเธฃเธฅเนเธฅเธญเธฃเน เธเธงเธฒเธกเธเธณเธเธฐเนเธกเนเธชเธนเธเนเธชเธตเธขเนเธเนเธกเธทเนเธญเธเธญเธเธเธฅเธฑเนเธเธเนเธฒเธขเนเธเธญเธญเธ
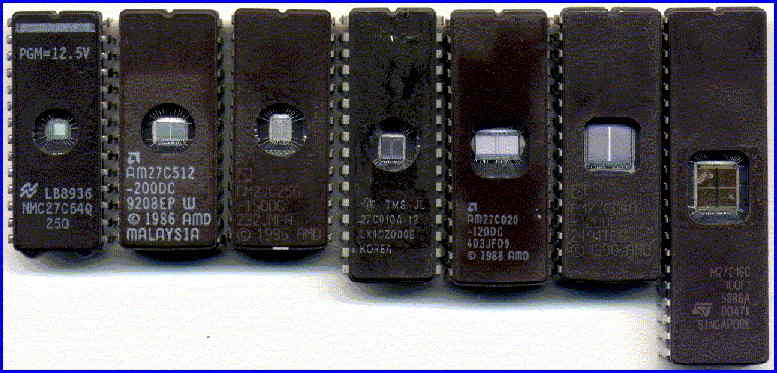
เธฃเธญเธกเธกเธตเธญเธขเธนเนเธซเธฅเธฒเธขเธเธฃเธฐเนเธ เธ เธญเธฒเธเธดเนเธเนเธ เธฃเธญเธกเธเธตเนเธชเธฒเธกเธฒเธฃเธเนเธเธฃเนเธเธฃเธก เนเธฅเธฐเธฅเธเธเนเธญเธกเธนเธฅเนเธเน เธซเธฃเธทเธญเธญเธตเธเธฃเนเธญเธก (Erasable Programmable ROM: EPROM), เธฃเธญเธกเธเธตเนเนเธเนเนเธเธเนเธฒเนเธเธทเนเธญเธเธฒเธฃเธฅเธ เธซเธฃเธทเธญเธเธฒเธฃเนเธเธฃเนเธเธฃเธก เธซเธฃเธทเธญเธญเธตเธญเธตเธเธฃเนเธญเธก (Electrically Erasable Programmable ROM: EEPROM) เนเธฅเธฐเธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเนเธเธฅเธ (Flash memory) (เนเธเนเธเธเธเธดเธเธเธตเนเนเธซเธกเนเธเธงเนเธฒเธญเธตเธญเธตเธเธฃเนเธญเธก) เนเธเธฃเธญเธกเนเธเนเธฅเธฐเธเธฃเธฐเนเธ เธ เธเธฐเนเธเนเธญเธเธดเธเธฒเธขเธเนเธญเนเธเนเธเธซเธเธฑเธเธชเธทเธญเนเธฅเนเธกเธเธตเน
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธฃเธญเธกเธเธเธดเธเธเนเธฒเธ เน
เธฃเธนเธเธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเนเธเธฅเธ
เธขเธฑเธเธกเธตเธเธทเนเธเธเธตเนเธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเนเธเธเธเธดเนเธจเธฉเนเธเนเธกเนเธเธฃเนเธเธฃเนเธเธชเนเธเธญเธฃเนเธเธตเนเนเธฃเธตเธขเธเธงเนเธฒ เธฃเธตเธเธตเธชเนเธเธญเธฃเน (Registers) เธเธฑเธงเธฃเธตเธเธตเธชเนเธเธญเธฃเนเธเธตเนเนเธเนเธเธเธงเธฒเธกเธเธณเนเธเนเนเธงเธกเธฒเธ เนเธฅเธฐเนเธเนเธเนเธเนเนเธเธตเธขเธเธเธฑเนเธงเธเธฃเธฒเธง เธเธฐเธกเธตเธเธณเธชเธฑเนเธเนเธเธฃเนเธเธฃเธกเนเธเธเธฒเธฃเธเธณเนเธเธดเธเธเธฒเธฃเธเธฑเนเธงเธเธฃเธฒเธง, เธกเธตเธเนเธฒเธเธฑเธงเธเธฅเธฒเธเธเธตเนเธเธณเนเธเนเธเนเธเธทเนเธญเนเธเนเนเธเธเธฒเธฃเธเธณเธเธงเธ, เธเนเธญเธกเธนเธฅเธเธตเนเธเธณเนเธเนเธเธชเธณเธซเธฃเธฑเธเธเธฒเธฃเนเธเธฃเธตเธขเธเนเธเธตเธขเธ เนเธฅเธฐเธเนเธญเธกเธนเธฅเธเธตเนเธเธณเนเธเนเธเธชเธณเธซเธฃเธฑเธเธเธฒเนเธเนเธฒ เธซเธฃเธทเธญเธเธฒเธญเธญเธ
เธฃเธนเธเธเธฑเธงเธญเธขเนเธฒเธเธเธฑเธเธเธณเธเธฒเธเธเธญเธเธฃเธตเธเธตเธชเนเธเธญเธฃเน
เธเธฒเธฃเนเธเธฅเธทเนเธญเธเธเธตเนเนเธขเธเธขเนเธฒเธขเธเนเธญเธกเธนเธฅเนเธเธซเธเนเธงเธขเธเธงเธฒเธกเธเธณเธเนเธฒเธ เน เนเธซเธฅเนเธฒเธเธตเน เธเธฒเธเธเธธเธเธซเธเธถเนเธเนเธเธขเธฑเธเธเธธเธเธญเธทเนเธ เน เธเธฑเนเธเนเธเนเธฃเธก, เธฃเธญเธก เนเธฅเธฐเธฃเธตเธเธตเธชเนเธเธญเธฃเน เธเธณเนเธเนเนเธเธขเธเธฒเธฃเนเธเนเนเธชเนเธเธเธฒเธ เธเธฑเธช (Bus) เนเธเธเธฒเธฃเธฃเธฑเธเธชเนเธเธเนเธญเธกเธนเธฅเธเธตเนเธซเธฅเธฒเธเธซเธฅเธฒเธขเธเธฃเนเธญเธกเธเธฑเธ
เธเนเธญเธเธดเธเธเธต เน เธเธตเนเธเธณเธกเธฒเธเธฒเธ
“เธเธญเนเธซเนเธเธฅเนเธฒเธเธตเนเธเธฐเธเนเธฒเธง
เนเธกเนเธเธฐเนเธเนเธเธเนเธฒเธงเธเธตเนเธเนเธฒ เน
เนเธเนเธเนเธขเธฑเธเธเธตเธเธงเนเธฒ
เธขเธทเธเธญเธขเธนเนเธเธตเนเนเธเธดเธก”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}