เครื่องกล 6 แกน
1. บทนำเข้าสู่ความรู้เครื่องกล 6 แกน
วิดีโอระบบหกแกน
แนะนำเพื่อให้อ่านได้ต่อเนื่องให้ คลิกขวาเลือก Open link in new window
เครื่องกล และเครื่องมือกลทางอุตสาหกรรมส่วนมาก เช่น เครื่องกัด, เครื่องเจาะ, เครื่องกลึง, แขนกลแบบแกนเรียงต่อกัน (Stacked axis robots) และอื่น ๆ มีสถาปัตยกรรมการสร้างโดยใช้พื้นฐานวิชาทาง จลศาสตร์ (kinematic: การเคลื่อนที่ของวัตถุโดยไม่ได้อ้างถึงแรงอันเป็นสาเหตุให้เกิดการเคลื่อนที่)
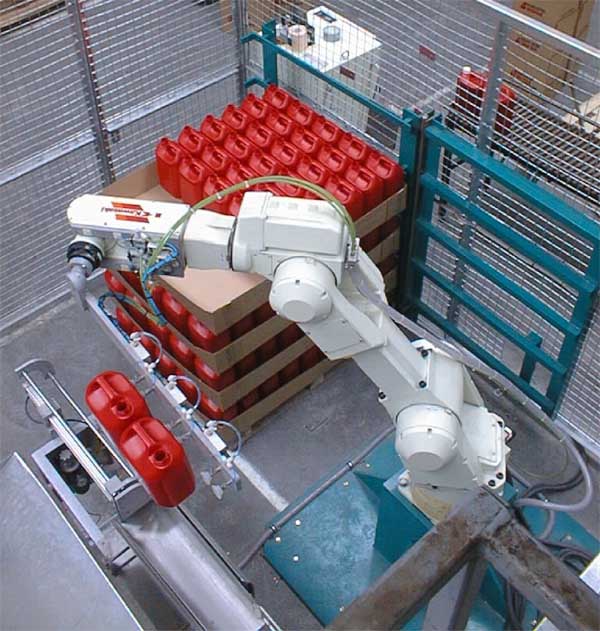
รูปแขนกลแกนเรียงต่อกัน
แขนกลแบบแกนเรียงต่อกันจะทำงานแบบเรียงลำดับอนุกรม ที่เป็น วนรอบเปิด (Open loop) ซึ่งหมายถึงการรองรับแต่ละแกนเรียงต่อกัน (Series) แบบแกนต่อแกนไปจนถึงปลายของแขนกล ซึ่งจะรวมถึงข้อต่อ (Joints) และอุปกรณ์ทำงาน (Actuators) รูปด้านล่าง
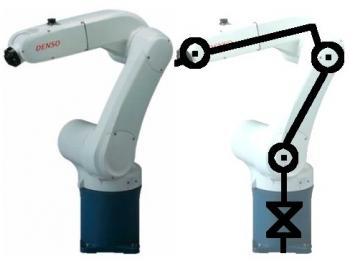
รูปสถาปัตยกรรมหุ่นยนต์ (กลไกชิ้นต่อโยงต่อแบบอนุกรม)
หุ่นยนต์ (แขนกล) ตั้งอยู่บนหลักการของส่วนประกอบที่ตั้งฉากกันของแกนสามแกน โดยแกนหนึ่งเป็นฐาน และอีกสองแกนจะเกิดการหมุน สามารถยืดออกไปทำงานได้ แต่ละส่วนการเคลื่อนที่จะทำงานอยู่ในรูปแบบ ระบบพิกัดคาร์ทีเชียน (Cartesian coordinate system) เพื่อควบคุมการเคลื่อนที่ทำงาน ภายในขอบเขตพื้นที่ที่กำหนด โดย ส่วนประกอบจะมี ส่วนฐาน (Bed), ส่วนโยง (Saddle) และอื่น ๆ
การวิเคราะห์ทางจลศาสตร์ ของระบบแกนเรียงซ้อนกัน หรือเรียงลำดับอนุกรมเหล่านี้ อาจเกิดข้อผิดพลาดขึ้นมาได้ ถ้ามีการทำงานไม่สัมพันธ์กันในแต่ละแกน อาทิเช่น ถ้าเกิดความคลาดเคลื่อนในแกนใดแกนหนึ่ง จะส่งผลทำให้เกิดความคลาดเคลื่อนขึ้นกับแกนทั้งหมดได้ จะทำให้ช่วงปลายที่ใช้ทำงานของแขนกลจะหลุดตำแหน่งไปจากตำแหน่งเดิม และความผิดพลาดอาจจะมีเพิ่มมากขึ้นถ้าเกิดความคลาดเคลื่อน เกิดขึ้นในแต่ละจุดหมุน
นี้ก็เป็นข้อเสียหนึ่งของหุ่นยนต์ในระบบแขนกลแกนต่อโยงเรียงซ้อน และเพื่อให้เกิดความเสถียรในการเคลื่อนที่ทำงาน จึงมีความจำเป็นที่ต้องทำให้มันมีน้ำหนัก และออกแบบสร้างให้มันแข็งแกร่งมาก แต่ก็จะส่งผลทำให้มันมีความเทอะทะในการเคลื่อนที่ทำงาน
ส่วนเครื่องกล และเครื่องมือกลสมัยใหม่ ในปัจจุบันจะมีข้อดีก็คือ จะทำงานในลักษณะวนรอบปิด (Closed-loop) ทำงานแบบจลศาสตร์ขนาน (Parallel) ซึ่งยังคงเป็นเทคโนโลยีที่ใหม่ในศตวรรษที่ 21 การพัฒนาจึงยังคงมีอย่างต่อเนื่อง เป็นสิ่งที่น่าสนใจเป็นจำนวนมาก
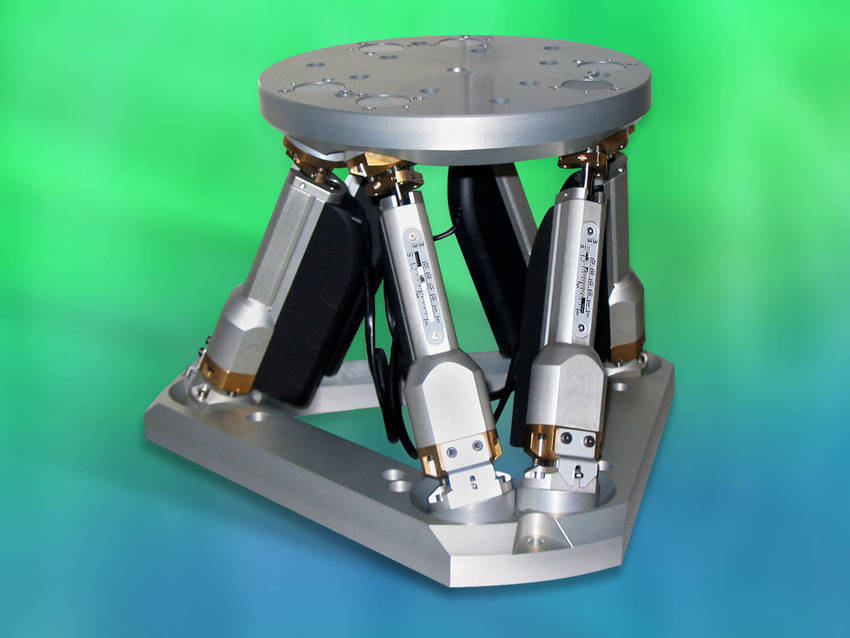
มีต้นแบบมากมายที่ถูกพัฒนาขึ้นมาโดยบริษัทที่มีชื่อเสียงหลายบริษัท ตัวต้นแบบมีการทดสอบเพื่อให้ได้ผลเป็นไปตามแนวคิดตามระบบจลศาสตร์แบบขนาน (Parallel Kinematic System: PKS) ระบบลักษณะเช่นนี้เราจะรู้จักโดยเรียกมันว่า ระบบแบบหกแกน (Hexapod) และสามแกน (Tripods) รูปด้านล่าง
รูปเครื่องกลระบบจลศาสตร์แบบขนาน
วิดีโอเทคโนโลยีเครื่องกลหกแกน OKUMA PM-600V
ในรูปด้านบนเป็นรูปแบบอย่างที่มีชื่อเรียกว่า กลไกจลศาสตร์ขนาน (Parallel Kinematic Mechanism: PKM) ที่จะกำลังกล่าวนี้ จะได้ศึกษาจนรู้จัก การทำงานของตำแหน่งอุปกรณ์หกแกนขั้นพื้นฐานที่ถูกนำมาใช้งานในเทคโนโลยีเครื่องกล และเครื่องมือกล โดยจะกล่าวถึงลักษณะการออกแบบ, ส่วนประกอบ และลักษณะการติดตามนำร่อง
วิดีโอเครื่องกลหกแกน
ข้อคิดดี ๆ ที่นำมาฝาก
“จงประหยัด คำติ แต่อย่าตระหนี่ คำชม”
{kind=link}
{kind=link}
{kind=link}