9.3.2 ลักษณะการออกแบบ
กลไกหกแกนมีลักษณะการออกแบบอยู่สองหลักใหญ่ ๆ มีดังนี้
1. กลไกหกแกน แกนค้ำเป็นแบบแท่งแกนสไลด์ (Telescopic struts) หรือระบบอินเจอร์โซล (Ingersoll system)
2. กลไกหกแกน แกนค้ำเป็นแบบแท่งบอลสกรู (Ball screw struts) หรือระบบเฮเซล และจีโอดิติก (Hexel & Geodetic system)
9.3.2.1 กลไกหกแกน แกนค้ำเป็นแบบแท่งแกนสไลด์
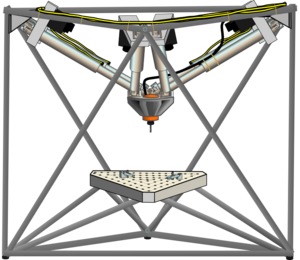
กลไกหกแกน แกนค้ำเป็นแบบแท่งแกนสไลด์ หรือระบบอินเจอร์โซล ในการออกแบบกลไกชนิดนี้ กลไกหกแกนจะมีส่วนประกอบของกระบอกไฮดรอลิกส์หกตัว, แท่งแกนสไลด์ พื้นที่หน้าตัดของแท่นแกนสไลด์อาจเป็นหน้าตัดแบบวงกลม หรือสี่เหลี่ยม หรือรูปแบบอื่น ๆ ก็ได้ขึ้นอยู่กับการออกแบบใช้งาน แล้วมีอิสระในการที่จะให้มีการเคลื่อนที่แบบยืด หรือหดตัวระหว่างฐานหกเหลี่ยมอยู่กับที่ และแผ่นฐานเคลื่อนสามเหลี่ยม
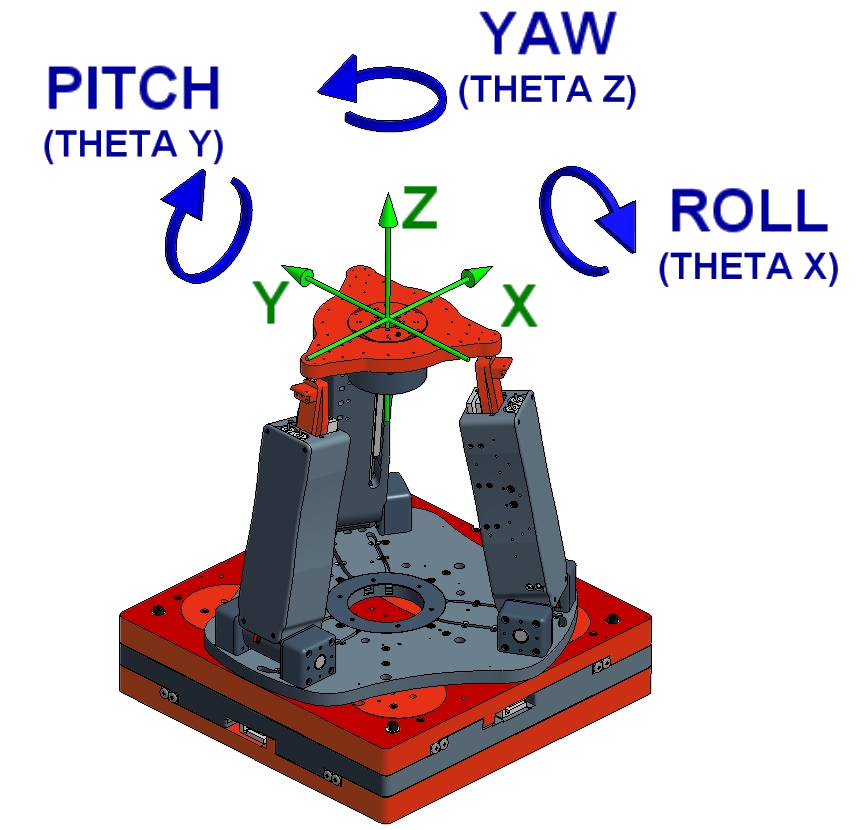
แท่นสามเหลี่ยมอธิบายองค์ประกอบด้านขาออกที่ได้จาก หกองศาอิสระ (6 Degrees Of Freedom: DOF) ของระบบ ดูที่รูปด้านล่าง
รูปกลไกหกแกนที่เคลื่อนที่แบบอินเจอร์โซล เคลื่อนที่ได้ 6 องศาอิสระ
แนะนำเพื่อให้อ่านได้ต่อเนื่องให้ คลิกขวาเลือก Open link in new window
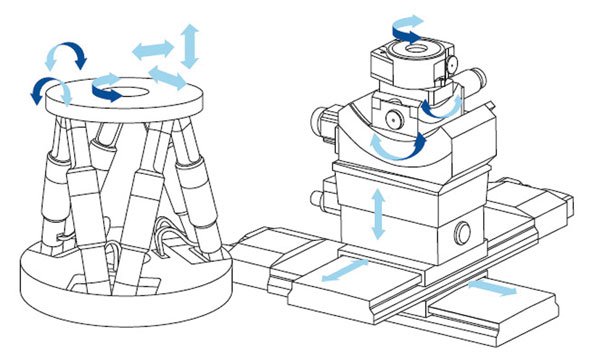
รูปกลไกหกแกนเทียบกับกลไกเคลื่อนที่แบบทั่วไป
วิดีโอเครื่องกลหกแกน
ปลายทั้งสองของแท่งแกนสไลด์ (Telescopic struts) ไฮดรอลิกส์เป็นการเชื่อมโยงในแต่ละฐานสามเหลี่ยม หรือฐานโดยข้อต่อเอนกประสงค์ หรือข้อต่ออิสระ (Universal joints) ดูที่รูปด้านล่าง
รูปแท่งแกนสไลด์ กับข้อต่ออิสระ
ซึ่งระบบนี้ถูกนำมาใช้เป็นครั้งแรกในเครื่องจำลองการบิน
รูปเครื่องจำลองการบิน
ต่อมาเมื่อมีการพัฒนากลไกให้ดียิ่งขึ้นมันจึงถูกนำมาใช้ในทางการค้า จนมีการนำไปใช้งานได้อย่างมากมายหลากหลายสาขา เช่น งานภาคอุตสาหกรรม, งานวิศวกรรม, งานทางการแพทย์, งานทางวิทยาศาสตร์, งานทางวิทยาศาสตร์ ฯลฯ ส่วนความละเอียดในการทำงานของกลไกหกแกนนี้ มันมีความละเอียดแม่นยำมากจนบางครั้ง มีความละเอียดได้ถึงขนาดเป็นไมครอน (mm: 1 ´10-6 m) เลยทีเดียว
สมการกลไกระบบอินเจอร์โซล ในองศาอิสระ (DOF) โดยรวมของระบบได้ทำการอธิบายโดยใช้กฏเกณฑ์ของคัตซ์แบ็ค (Kutzbach criterion) เป็นไปตามสมการดังนี้

สมการคัตซ์แบ็ค
กำหนดให้ M = ความสัมพันธ์ระหว่างการเคลื่อนที่ (Mobility)
ci = ข้อจำกัด (Constraints)
ne = ส่วนประกอบรวมของระบบ
การคำนวณขององศาอิสระของกลไกหกแกนแบบแท่งแกนสไลด์ หรืออินเจอร์โซล
ชิ้นส่วนของกลไกหกแกนโดยรวม = ชุดแท่งแกนสไลด์ 6 คูณ 2 ชิ้นส่วน + ฐาน 1 + 1 แท่นฐาน
= 2 ´ 6 + 1 + 1 = 14
จะได้ชิ้นส่วนเครื่องกลของกลไกหกแกนอย่างน้อย เท่ากับ 14 ชิ้น
หาองศาอิสระโดยรวม DOFtotal = 6(ne - 1)
= 6(14 - 1)
= 6 ´ 13
= 78 DOF
ดังนั้น องศาอิสระโดยรวมเท่ากับ 78 DOF
|
จำนวน
|
สิ่งที่เกิดขึ้น
|
ข้อจำกัด
|
องศาอิสระ
|
อธิบายลักษณะ
|
|
6
|
ฐาน: เชื่อมต่อ (Yokes) ½ UJ
|
4
|
2
|
RR
|
|
6
|
แท่งทรงกระบอก และแท่งยาว
|
4
|
2
|
TR
|
|
6
|
แท่งแกน/ฐาน UJ
|
4
|
2
|
RR
|
|
ข้อสังเกต: R: หมุน, T: เคลื่อนที่, UJ: ข้อต่ออเนกประสงค์ (Universal joint), Cyl: ทรงกระบอก
|
ตารางการวิเคราะห์ระบบแท่นแกนสไลด์
ในตาราง ข้อจำกัดโดยรวม = 3 ´ 6 ´ 4 = 72 ข้อจำกัด
เพราะฉะนั้น
M = 78 – 72 = 6 DOF (สามการเคลื่อนที่ และสามการหมุน)
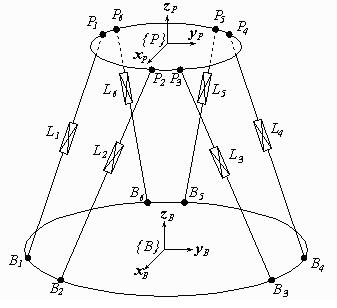
รูปผังกลไกหกแกน
รูปแนวการหมุนฐานเคลื่อนที่แบบเอียง
รูปเครื่องกลหกแกน
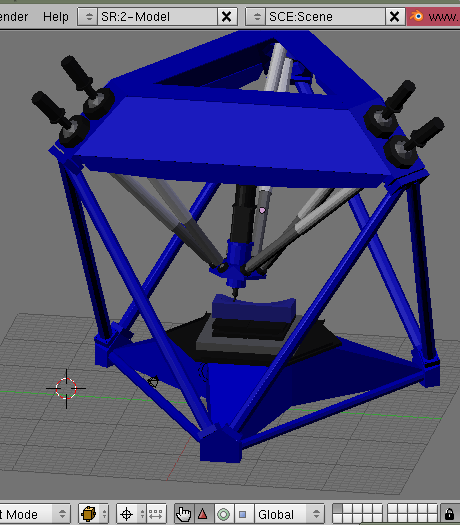
โดยการผสมผสานโครงของโครงสร้างที่มี 8 ด้าน ดูที่รูปด้านล่าง
รูปแบบจำลองโครงสร้างของกลไกหกแกน
รูปโครงสร้างที่ติดตั้งกลไกหกแกน
จากการพิจารณาสิ่งด้านบนของอุปกรณ์กลไกหกแกนที่เป็นระบบอินเจอร์โซล จะได้โครงสร้างที่มีความแข็งแกร่ง มีความทนทานต่อแรงกระแทกขณะทำงาน มีความแม่นยำเวลาทำงาน, ให้คุณภาพผิวงานที่มีความละเอียด (กรณีเครื่องมือกล)
ตัวอย่างกลไกหกแกนที่นำมาใช้ในงานเครื่องมือกล ก็คือเครื่องกัด 6 แกน ระบบอินเจอร์โซล มีเพลาหมุนแนวนอนกลไกหกเหลี่ยมแปดด้าน (Horizontal spindle Octahedral Hexapod: HOH) -600 และเพลาหมุนแนวตั้งกลไกหกเหลี่ยมแปดด้าน (Vertical spindle Octahedral Hexapod: VOH) – 1000 ดูที่รูปด้านล่าง
รูปเครื่องมือกลหกแกนของยี่ห้ออินเจอร์โซล รุ่น ออคทาฮีดรอล เฮกะพอด เฮชโอเฮช-600 (Octahedral Hexapod (HOH) 600)
มีโครงสร้างเครื่องเป็นรูปเหลี่ยมแปดด้าน (Octahedron) มีส่วนประกอบของคาน 12 ท่อนความยาวเท่ากัน มีข้อต่อหกจุดเชื่อม โครงสร้างมีความแข็งแกร่ง รองรับน้ำหนัก ฐานตัวเครื่อง, กลไกหัวเพลาหมุน, กลไกหกแกนไฮดรอลิกส์พร้อมกับแท่งแกนสไลด์ ประกอบติดกับแผ่นฐานอยู่กับที่ และแผ่นฐานเคลื่อนที่ (ติดหัวเพลาหมุน)
ตัวอย่างข้อมูลทางด้านเทคนิคของรุ่น VOH-1000 มีดังนี้
แกนเคลื่อนที่: X, Y, Z = 600, 600, 800 mm
อัตราป้อน: อัตราป้อนสูงสุด (ตามแกน) = 30 m/min
อัตราการเคลื่อนที่สูงสุด (ตามแกน) = 30 m/min
ความเร่ง: 0.5 G (4.8 m/s2) ทั้งนี้ขึ้นอยู่กับตำแหน่ง X, Y, Z
เพลาหมุน: ช่วงความเร็ว = 0 – 20,000 rpm
แรงบิดสูงสุด = 49 Nm
กำลังงานสูงสุด = 37.5 kW
ความดันหล่อเย็น: 50 บาร์ผ่านเพลาหมุน
ซองเก็บมีด: 40, 80 ตัว, นำหนักของมีดสูงสุด = 12 กิโลกรัม
ความแม่นยำทางปริมาตร: 20 ไมครอน การใช้เลเซอร์วัดแนวทแยงมุมเคลื่อนที่สะดวก
รูปเครื่องมือกลหกแกน
วิดีโอเครื่องมือกลหกแกนซีเอ็นซีกัดไม้
ข้อคิดดี ๆ ที่นำมาฝาก
“คนที่รู้จักจุดหมายปลายทางของตนเอง
คือคนที่เดินทางไปได้ไกลที่สุด”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}