3.7 р╕Бр╕▓р╕гр╕Др╕зр╕Ър╕Др╕╕р╕бр╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ р╕Вр╕▓р╕нр╕нр╕Б
3.7.1 р╕Бр╕▓р╕гр╣Вр╕Юр╕ер╕ер╕┤р╣Ир╕З р╣Бр╕ер╕░р╕Бр╕▓р╕гр╕гр╕Ър╕Бр╕зр╕Щ
р╕бр╕╡р╕зр╕┤р╕Шр╕╡р╕Бр╕▓р╕гр╕Юр╕╖р╣Йр╕Щр╕Рр╕▓р╕Щр╕кр╕нр╕Зр╕зр╕┤р╕Шр╕╡р╕кр╕│р╕лр╕гр╕▒р╕Ър╕Хр╕▒р╕зр╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣М р╣Ар╕Юр╕╖р╣Ир╕нр╕Др╕зр╕Ър╕Др╕╕р╕бр╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ р╣Бр╕ер╕░р╕Вр╕▓р╕нр╕нр╕Б р╕Бр╣Зр╕Др╕╖р╕нр╕зр╕┤р╕Шр╕╡р╕Бр╕▓р╕гр╕Чр╕╡р╣Ир╣Ар╕гр╕╡р╕вр╕Бр╕зр╣Ир╕▓ р╕Бр╕▓р╕гр╣Вр╕Юр╕ер╕ер╕┤р╣Ир╕З (Polling) р╣Бр╕ер╕░р╕Бр╕▓р╕гр╕гр╕Ър╕Бр╕зр╕Щ (Interrupts)
р╕гр╕╣р╕Ыр╣Бр╕Ьр╕Щр╕ар╕▓р╕Юр╕Бр╕▓р╕гр╣Др╕лр╕ер╕Юр╕╖р╣Йр╕Щр╕Рр╕▓р╕Щр╕Вр╕нр╕Зр╕Зр╕▓р╕Щр╕Чр╕╡р╣Ир╣Гр╕Кр╣Йр╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╣Ар╕Юр╕╖р╣Ир╕нр╕Др╕зр╕Ър╕Др╕╕р╕бр╕лр╕╕р╣Ир╕Щр╕вр╕Щр╕Хр╣М
р╣Бр╕Щр╕░р╕Щр╕│р╣Ар╕Юр╕╖р╣Ир╕нр╣Гр╕лр╣Йр╕нр╣Ир╕▓р╕Щр╣Др╕Фр╣Йр╕Хр╣Ир╕нр╣Ар╕Щр╕╖р╣Ир╕нр╕Зр╣Гр╕лр╣Й р╕Др╕ер╕┤р╕Бр╕Вр╕зр╕▓р╣Ар╕ер╕╖р╕нр╕Б Open link in new window
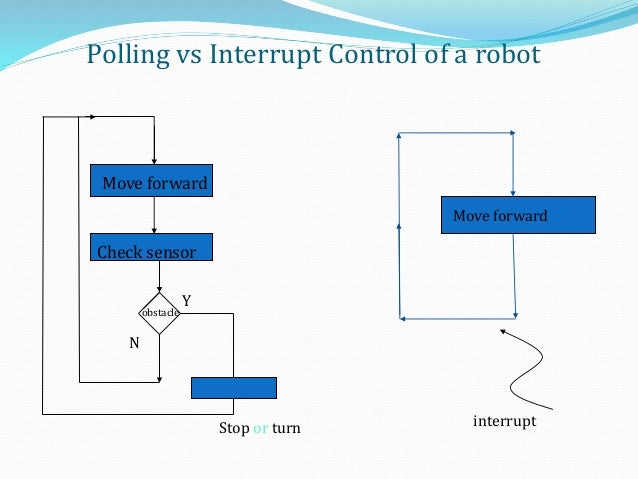
р╕Бр╕▓р╕гр╣Вр╕Юр╕ер╕ер╕┤р╣Ир╕Зр╕Чр╕╡р╣Ир╣Ар╕лр╕бр╕▓р╕░р╕кр╕б р╣Др╕Фр╣Йр╕Ир╕▓р╕Бр╕Бр╕▓р╕гр╕Чр╕╡р╣Ир╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕Хр╕гр╕зр╕Ир╕кр╕нр╕Ър╕Бр╕▓р╕гр╕Чр╕│р╕Зр╕▓р╕Щр╣Ар╕Ыр╣Зр╕Щр╕Кр╣Ир╕зр╕З р╣Ж р╣Гр╕Щр╕нр╕╕р╕Ыр╕Бр╕гр╕Ур╣Мр╕Хр╣Ир╕нр╕Юр╣Ир╕зр╕Зр╕Чр╕╡р╣Ир╕бр╕▓р╕Бр╕бр╕▓р╕в р╣Ар╕Юр╕╖р╣Ир╕нр╕Щр╕│р╕бр╕▓р╕Др╕│р╕Щр╕зр╕У р╕Цр╣Йр╕▓р╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ р╕лр╕гр╕╖р╕нр╕Вр╕▓р╕нр╕нр╕Бр╕Хр╣Йр╕нр╕Зр╕Цр╕╣р╕Бр╣Гр╕лр╣Йр╕гр╕нр╕Др╕нр╕в р╣Ар╕Юр╕гр╕▓р╕░р╕лр╕▓р╕Бр╕нр╕╕р╕Ыр╕Бр╕гр╕Ур╣Мр╕Чр╕╡р╣Ир╕Бр╕│р╕ер╕▒р╕Зр╕Хр╣Ир╕нр╕Юр╣Ир╕зр╕Зр╕Ър╕▓р╕Зр╕Др╕гр╕▒р╣Йр╕Зр╕Ир╕░р╕бр╕╡р╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ р╕лр╕гр╕╖р╕нр╕Вр╕▓р╕нр╕нр╕Бр╕Ыр╕гр╕┤р╕бр╕▓р╕Ур╕бр╕▓р╕Бр╣Бр╕Др╣Ир╣Др╕лр╕Щр╕Щр╕▒р╣Ир╕Щ р╕Бр╣Зр╕Вр╕╢р╣Йр╕Щр╕нр╕вр╕╣р╣Ир╕Бр╕▒р╕Ър╕Бр╕гр╕░р╕Ър╕зр╕Щр╕Бр╕▓р╕г
р╕гр╕╣р╕Ыр╕Бр╕▓р╕гр╣Вр╕Юр╕ер╕ер╕┤р╣Ир╕З
р╕Др╣Ир╕▓р╕кр╕Цр╕▓р╕Щр╕░р╕Вр╕нр╕Зр╕кр╕▒р╕Нр╕Нр╕▓р╕Ур╕Ир╕░р╕Цр╕╣р╕Бр╕Хр╕▒р╣Йр╕Зр╕Др╣Ир╕▓ р╕Ыр╕▒р╕Нр╕лр╕▓р╕Щр╕▒р╣Ир╕Щр╕бр╕▒р╕Бр╕бр╕▓р╕Ир╕▓р╕Бр╕Бр╕гр╕░р╕Ър╕зр╕Щр╕Бр╕▓р╕гр╣Гр╕Щр╣Ар╕гр╕╖р╣Ир╕нр╕Зр╕Вр╕нр╕Зр╣Ар╕зр╕ер╕▓ р╣Ар╕Юр╕╖р╣Ир╕нр╣Ар╕Ыр╣Зр╕Щр╕Бр╕▓р╕гр╕Хр╕гр╕зр╕Ир╕кр╕нр╕Ър╕Вр╕нр╕Зр╣Ар╕кр╕╡р╕вр╕кр╕│р╕лр╕гр╕▒р╕Ър╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ р╣Ар╕бр╕╖р╣Ир╕нр╕Юр╕зр╕Бр╕бр╕▒р╕Щр╣Др╕бр╣Ир╣Ар╕Бр╕┤р╕Фр╕Бр╕▓р╕гр╣Ар╕Ыр╕ер╕╡р╣Ир╕вр╕Щр╣Бр╕Ыр╕ер╕З
р╕Бр╕▓р╕гр╣Гр╕лр╣Йр╣Ар╕Бр╕┤р╕Фр╕Бр╕▓р╕гр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░ (Servicing an interrupt) р╕кр╕▒р╕Нр╕Нр╕▓р╕У р╣Ар╕Ыр╣Зр╕Щр╣Ар╕гр╕╖р╣Ир╕нр╕Зр╕Вр╕нр╕З р╕зр╕┤р╕Шр╕╡р╕Бр╕▓р╕гр╣Ар╕ер╕╖р╕нр╕Б (Alternative method) р╣Ар╕Юр╕╖р╣Ир╕нр╣Гр╕Кр╣Йр╕Др╕зр╕Ър╕Др╕╕р╕бр╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ р╣Бр╕ер╕░р╕Вр╕▓р╕нр╕нр╕Б р╣Гр╕Щр╕зр╕┤р╕Шр╕╡р╕Бр╕▓р╕гр╕Щр╕╡р╣Й р╕гр╕╡р╕Ир╕╡р╕кр╣Ар╕Хр╕нр╕гр╣Мр╣Гр╕Щр╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕Хр╣Йр╕нр╕Зр╕бр╕╡р╕Бр╕▓р╕гр╕Хр╕▒р╣Йр╕Зр╕Др╣Ир╕▓р╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░р╣Ар╕Ыр╕┤р╕Фр╣Гр╕Кр╣Йр╕Зр╕▓р╕Щ (Interrupt Enable: IE) р╣Вр╕Фр╕вр╣Ар╕Йр╕Юр╕▓р╕░р╕нр╕вр╣Ир╕▓р╕Зр╕вр╕┤р╣Ир╕Зр╕кр╕│р╕лр╕гр╕▒р╕Ър╕нр╕╕р╕Ыр╕Бр╕гр╕Ур╣Мр╕Хр╣Ир╕нр╕Юр╣Ир╕зр╕З
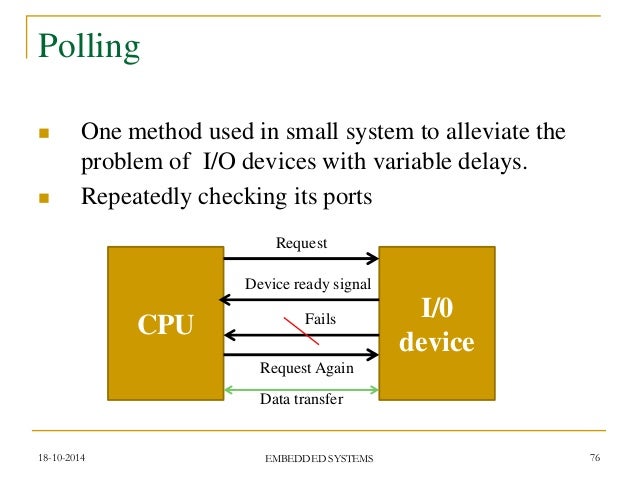
р╕гр╕╣р╕Ыр╕Бр╕▓р╕гр╕гр╕Ър╕Бр╕зр╕Щр╣Гр╕Щр╕нр╕╕р╕Ыр╕Бр╕гр╕Ур╣Мр╕Хр╣Ир╕нр╕Юр╣Ир╕зр╕З
р╣Ар╕бр╕╖р╣Ир╕нр╕бр╕╡р╕Бр╕▓р╕гр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░р╣Ар╕гр╕┤р╣Ир╕бр╕Вр╕╢р╣Йр╕Щр╣Вр╕Фр╕вр╕нр╕╕р╕Ыр╕Бр╕гр╕Ур╣Мр╕Хр╣Ир╕нр╕Юр╣Ир╕зр╕Зр╕Чр╕╡р╣Ир╣Ар╕Юр╕┤р╣Ир╕бр╣Ар╕Вр╣Йр╕▓р╕бр╕▓ р╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕Ир╕░р╕Бр╕│р╕лр╕Щр╕Фр╕Др╣Ир╕▓р╕кр╕Цр╕▓р╕Щр╕░р╣Ар╕Юр╕╖р╣Ир╕н р╕Бр╕▓р╕гр╕гр╣Йр╕нр╕Зр╕Вр╕нр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░ (Interrupt ReQuest: IRQ) р╕Ир╕░р╕Щр╕│р╣Др╕Ыр╣Гр╕Кр╣Йр╕Зр╕▓р╕Щ р╣Бр╕ер╕░р╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕Ир╕░р╕Чр╕│р╣Гр╕лр╣Йр╣Ар╕Бр╕┤р╕Фр╕Бр╕▓р╕гр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░
р╕гр╕╣р╕Ыр╕нр╕╕р╕Ыр╕Бр╕гр╕Ур╣Мр╕Хр╣Ир╕▓р╕З р╣Ж р╕Чр╕╡р╣Ир╕Хр╣Ир╕нр╕Юр╣Ир╕зр╕Зр╣Ар╕Юр╕╖р╣Ир╕нр╣Гр╕лр╣Йр╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕гр╣Йр╕нр╕Зр╕Вр╕нр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░
р╕Бр╕▓р╕гр╣Гр╕лр╣Йр╣Ар╕Бр╕┤р╕Фр╕Бр╕▓р╕гр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░ р╕лр╕бр╕▓р╕вр╕Цр╕╢р╕З р╕Бр╕гр╕░р╕Ър╕зр╕Щр╕Бр╕▓р╕гр╕Ыр╕гр╕░р╕бр╕зр╕ер╕Ьр╕ер╕Вр╕нр╕Зр╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╣Гр╕Щр╕Вр╕Ур╕░р╕Чр╕╡р╣Ир╕Чр╕│р╕Зр╕▓р╕Щр╣Вр╕Фр╕вр╕Ыр╕Бр╕Хр╕┤ р╣Бр╕ер╣Йр╕зр╕Цр╕╣р╕Бр╕лр╕вр╕╕р╕Фр╕ер╕З р╕Бр╣Зр╕Др╕╖р╕нр╕Бр╕▓р╕гр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░р╕Щр╕▒р╣Ир╕Щр╣Ар╕нр╕З р╣Гр╕Щр╕Вр╕Ур╕░р╕Чр╕╡р╣Ир╕Чр╕│р╣Ар╕гр╕╖р╣Ир╕нр╕Зр╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ / р╕Вр╕▓р╕нр╕нр╕Бр╣Ар╕гр╕╡р╕вр╕Ър╕гр╣Йр╕нр╕вр╣Бр╕ер╣Йр╕з
р╣Ар╕Юр╕╖р╣Ир╕нр╕Чр╕╡р╣Ир╕Ир╕░р╣Гр╕лр╣Йр╕Бр╕ер╕▒р╕Ър╕бр╕▓р╕Чр╕│р╕Бр╕▓р╕гр╕Ыр╕гр╕░р╕бр╕зр╕ер╕Ьр╕ер╕Хр╕▓р╕бр╕Ыр╕Бр╕Хр╕┤ р╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕бр╕╡р╕Др╕зр╕▓р╕бр╕Ир╕│р╣Ар╕Ыр╣Зр╕Щр╕Хр╣Ир╕нр╕Бр╕▓р╕гр╕Ир╕▒р╕Фр╣Ар╕Бр╣Зр╕Ър╣Ар╕Щр╕╖р╣Йр╕нр╕лр╕▓р╕Вр╕нр╕Зр╕Бр╕▓р╕гр╕гр╕╡р╕Ир╕╡р╕кр╣Ар╕Хр╕нр╕гр╣М р╕Бр╣Ир╕нр╕Щр╕Чр╕╡р╣Ир╕Ир╕░р╣Ар╕Бр╕┤р╕Фр╕Бр╕▓р╕гр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░р╕Вр╕╢р╣Йр╕Щ р╕Бр╕гр╕░р╕Ър╕зр╕Щр╕Бр╕▓р╕гр╕Щр╕╡р╣Йр╕гр╕зр╕бр╣Др╕Ыр╕Цр╕╢р╕Зр╕Бр╕▓р╕гр╕Ър╕▒р╕Щр╕Чр╕╢р╕Бр╕Чр╕▒р╣Йр╕Зр╕лр╕бр╕Фр╕Чр╕╡р╣Ир╕бр╕╡р╕Бр╕▓р╕гр╕Бр╕│р╕лр╕Щр╕Фр╕гр╕╡р╕Ир╕╡р╕кр╣Ар╕Хр╕нр╕гр╣Мр╣Ар╕Ыр╣Зр╕Щр╕Бр╕ер╕╕р╣Ир╕б (Stack), р╕Ър╕▓р╕Зр╕кр╣Ир╕зр╕Щр╕Вр╕нр╕Зр╣Бр╕гр╕б р╣Ар╕Юр╕╖р╣Ир╕нр╕Бр╕▓р╕гр╕Щр╕╡р╣Й р╣Ар╕гр╕╡р╕вр╕Бр╕Бр╕гр╕░р╕Ър╕зр╕Щр╕Бр╕▓р╕гр╕Щр╕╡р╣Йр╕зр╣Ир╕▓ р╕Бр╕▓р╕гр╕Ьр╕ер╕▒р╕Бр╕Фр╕▒р╕Щ (Push)
р╕лр╕ер╕▒р╕Зр╕Ир╕▓р╕Бр╕Бр╕▓р╕гр╕Ьр╕ер╕▒р╕Бр╕Фр╕▒р╕Щ р╣Др╕бр╣Вр╕Др╕гр╣Вр╕Ыр╕гр╣Ар╕Лр╕кр╣Ар╕Лр╕нр╕гр╣Мр╕кр╕▓р╕бр╕▓р╕гр╕Цр╣Вр╕лр╕ер╕Фр╕Чр╕╡р╣Ир╕нр╕вр╕╣р╣Ир╕Вр╕нр╕Зр╕Бр╕▓р╕гр╕Вр╕▒р╕Фр╕Ир╕▒р╕Зр╕лр╕зр╕░р╣Др╕зр╣Йр╣Ар╕Ыр╣Зр╕Щр╕Ыр╕гр╕░р╕Ир╕│ р╣Бр╕ер╕░р╕Чр╕│р╕кр╕│р╣Ар╕гр╣Зр╕Ир╕Чр╕▒р╣Йр╕Зр╣Гр╕Щр╕Фр╣Йр╕▓р╕Щр╕Вр╕▓р╣Ар╕Вр╣Йр╕▓ / р╕Вр╕▓р╕нр╕нр╕Б р╣Ар╕бр╕╖р╣Ир╕нр╕кр╣Ир╕зр╕Щр╕Вр╕нр╕Зр╕гр╕лр╕▒р╕кр╣Др╕Фр╣Йр╕Чр╕│р╣Ар╕кр╕гр╣Зр╕Ир╕кр╕бр╕Ър╕╣р╕гр╕Ур╣Мр╣Бр╕ер╣Йр╕з р╣Ар╕Щр╕╖р╣Йр╕нр╕лр╕▓р╕Вр╕нр╕Зр╕Бр╕ер╕╕р╣Ир╕бр╕Чр╕╡р╣Ир╕бр╕╡р╕Бр╕▓р╕гр╣Вр╕лр╕ер╕Фр╕гр╕╡р╕Ир╕╡р╕кр╣Ар╕Хр╕нр╕гр╣Мр╕Вр╕╢р╣Йр╕Щр╕бр╕▓р╣Гр╕лр╕бр╣И р╣Гр╕Щр╕Бр╕▓р╕гр╕Чр╕│р╕Зр╕▓р╕Щр╣Бр╕Ър╕Ър╕Щр╕╡р╣Й р╕гр╕╣р╣Йр╕Ир╕▒р╕Бр╕Бр╕▒р╕Щр╣Гр╕Щр╕Кр╕╖р╣Ир╕нр╕зр╣Ир╕▓ р╕Бр╕▓р╕гр╕Ыр╣Кр╕нр╕Ъ р╕лр╕гр╕╖р╕нр╕Бр╕▓р╕гр╕Фр╕╢р╕З (Pop or Pull) р╕Чр╕│р╣Гр╕лр╣Йр╣Ар╕Бр╕┤р╕Фр╕Бр╕▓р╕гр╕Фр╕│р╣Ар╕Щр╕┤р╕Щр╕Бр╕▓р╕гр╕Ыр╕гр╕░р╕бр╕зр╕ер╕Ьр╕ер╕Хр╕▓р╕бр╕Ыр╕Бр╕Хр╕┤
р╕Вр╣Йр╕нр╕Др╕┤р╕Фр╕Фр╕╡ р╣Ж р╕Чр╕╡р╣Ир╕Щр╕│р╕бр╕▓р╕Эр╕▓р╕Б
“р╕Др╕Щр╕гр╕зр╕вр╕Чр╕╡р╣Ир╣Др╕бр╣Ир╕гр╕╣р╣Йр╕Ир╕▒р╕Бр╕Юр╕н
р╕Бр╣Зр╣Ар╕Ыр╣Зр╕Щр╕Др╕Щр╕Ир╕Щр╕нр╕вр╕╣р╣Ир╕Хр╕ер╕нр╕Фр╣Ар╕зр╕ер╕▓
р╕Др╕Щр╕Чр╕╡р╣Ир╕гр╕╣р╣Йр╕Ир╕▒р╕Бр╕Юр╕н
р╕Бр╣Зр╣Ар╕Ыр╣Зр╕Щр╕Др╕Щр╕бр╕▒р╣Ир╕Зр╕бр╕╡р╕нр╕вр╕╣р╣Ир╕Хр╕ер╕нр╕Фр╣Ар╕зр╕ер╕▓”
р╕кр╕бр╣Ар╕Фр╣Зр╕Ир╕Юр╕гр╕░р╕Нр╕▓р╕Ур╕кр╕▒р╕Зр╕зр╕г
{kind=link}
{kind=link}
{kind=link}
{kind=link}