ÓĖŻÓĖ╣ÓĖøÓĖóÓĖ▓ÓĖÖÓĖóÓĖÖÓĖĢÓ╣īÓĖŚÓĖĄÓ╣łÓĖéÓĖ▒ÓĖÜÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŁÓĖĖÓĖøÓĖüÓĖŻÓĖōÓ╣īÓĖöÓ╣ēÓĖ¦ÓĖóÓ╣äÓĖ¤ÓĖ¤Ó╣ēÓĖ▓ÓĖŁÓĖ┤Ó╣ĆÓĖźÓ╣ćÓĖüÓĖŚÓĖŻÓĖŁÓĖÖÓĖ┤ÓĖüÓĖ¬Ó╣ī
Ó╣üÓĖÖÓĖ░ÓĖÖÓĖ│Ó╣ĆÓĖ×ÓĖĘÓ╣łÓĖŁÓ╣āÓĖ½Ó╣ēÓĖŁÓ╣łÓĖ▓ÓĖÖÓ╣äÓĖöÓ╣ēÓĖĢÓ╣łÓĖŁÓ╣ĆÓĖÖÓĖĘÓ╣łÓĖŁÓĖćÓ╣āÓĖ½Ó╣ē ÓĖäÓĖźÓĖ┤ÓĖüÓĖéÓĖ¦ÓĖ▓Ó╣ĆÓĖźÓĖĘÓĖŁÓĖü Open link in new window
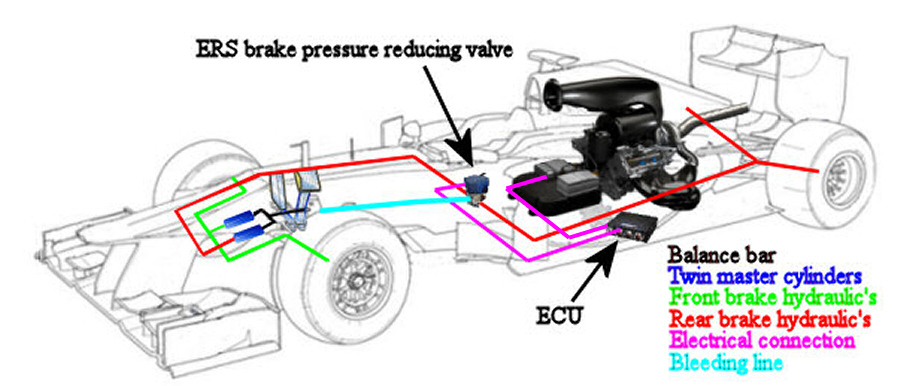
ÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖéÓĖŁÓĖćÓĖéÓĖ▒Ó╣ēÓĖÖÓĖĢÓĖŁÓĖÖ 1 - 3 ÓĖłÓĖ░ÓĖ¢ÓĖ╣ÓĖüÓĖÖÓĖ│ÓĖĪÓĖ▓Ó╣āÓĖŖÓ╣ēÓ╣āÓĖÖÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖéÓĖŁÓĖćÓĖóÓĖ▓ÓĖÖÓĖóÓĖÖÓĖĢÓ╣īÓĖ¬ÓĖĪÓĖ▒ÓĖóÓ╣āÓĖ½ÓĖĪÓ╣ł ÓĖöÓĖ▒ÓĖćÓ╣üÓĖ¬ÓĖöÓĖćÓ╣āÓĖÖÓĖŻÓĖ╣ÓĖøÓĖöÓ╣ēÓĖ▓ÓĖÖÓĖÜÓĖÖ Ó╣ĆÓĖøÓ╣ćÓĖÖÓĖóÓĖ▓ÓĖÖÓĖóÓĖÖÓĖĢÓ╣īÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓĖüÓĖ▓ÓĖŻ ÓĖéÓĖ▒ÓĖÜÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŁÓĖĖÓĖøÓĖüÓĖŻÓĖōÓ╣īÓĖöÓ╣ēÓĖ¦ÓĖóÓ╣äÓĖ¤ÓĖ¤Ó╣ēÓĖ▓ÓĖŁÓĖ┤Ó╣ĆÓĖźÓ╣ćÓĖüÓĖŚÓĖŻÓĖŁÓĖÖÓĖ┤ÓĖüÓĖ¬Ó╣ī (Drive-by-wire) ÓĖŗÓĖČÓ╣łÓĖćÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖ¦ÓĖ┤ÓĖśÓĖĄÓĖüÓĖ▓ÓĖŻÓ╣üÓĖÜÓĖÜÓĖäÓĖŻÓĖÜÓĖ¦ÓĖćÓĖłÓĖŻÓ╣āÓĖÖÓĖüÓĖŻÓĖ░ÓĖÜÓĖ¦ÓĖÖÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ½ÓĖźÓĖéÓĖŁÓĖćÓĖ×ÓĖźÓĖ▒ÓĖćÓĖćÓĖ▓ÓĖÖ ÓĖŗÓĖČÓ╣łÓĖćÓĖłÓĖ░ÓĖĪÓĖĄÓĖŚÓĖ▒Ó╣ēÓĖć ÓĖüÓĖŻÓĖ░ÓĖÜÓĖ¦ÓĖÖÓĖüÓĖ▓ÓĖŻÓĖŚÓĖ▓ÓĖćÓ╣äÓĖ¤ÓĖ¤Ó╣ēÓĖ▓, ÓĖŚÓĖ▓ÓĖćÓĖüÓĖź Ó╣üÓĖźÓĖ░ÓĖŚÓĖ▓ÓĖćÓ╣äÓĖ«ÓĖöÓĖŻÓĖŁÓĖźÓĖ┤ÓĖüÓĖ¬Ó╣īÓĖŚÓĖĄÓ╣łÓĖŚÓĖ│ÓĖćÓĖ▓ÓĖÖÓĖöÓ╣ēÓĖ¦ÓĖó ÓĖéÓĖŁÓĖćÓ╣äÓĖ½ÓĖźÓĖŚÓĖĄÓ╣łÓĖŁÓĖ▒ÓĖöÓĖĢÓĖ▒ÓĖ¦Ó╣äÓĖĪÓ╣łÓ╣äÓĖöÓ╣ē (Incompressible fluids) ÓĖĢÓĖ▓ÓĖŻÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣ł 2.4 ÓĖéÓ╣ēÓĖŁÓĖüÓĖ│ÓĖ½ÓĖÖÓĖöÓĖŚÓĖ▒Ó╣łÓĖ¦Ó╣äÓĖøÓĖŚÓĖĄÓ╣łÓ╣āÓĖŖÓ╣ēÓĖ£Ó╣łÓĖ▓ÓĖÖ Ó╣üÓĖźÓĖ░ÓĖüÓ╣ēÓĖ▓ÓĖ¦ÓĖéÓ╣ēÓĖ▓ÓĖĪÓĖĢÓĖ▒ÓĖ¦Ó╣üÓĖøÓĖŻ
|
ÓĖŻÓĖ░ÓĖÜÓĖÜ
|
ÓĖ£Ó╣łÓĖ▓ÓĖÖÓĖĢÓĖ▒ÓĖ¦Ó╣üÓĖøÓĖŻ
|
ÓĖéÓ╣ēÓĖ▓ÓĖĪÓĖĢÓĖ▒ÓĖ¦Ó╣üÓĖøÓĖŻ
|
|
Ó╣äÓĖ¤ÓĖ¤Ó╣ēÓĖ▓
|
ÓĖüÓĖŻÓĖ░Ó╣üÓĖ¬Ó╣äÓĖ¤ÓĖ¤Ó╣ēÓĖ▓
|
I
|
Ó╣üÓĖŻÓĖćÓĖöÓĖ▒ÓĖÖÓ╣äÓĖ¤ÓĖ¤Ó╣ēÓĖ▓
|
U
|
|
Ó╣üÓĖĪÓ╣łÓ╣ĆÓĖ½ÓĖźÓ╣ćÓĖü
|
ÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ½ÓĖźÓĖéÓĖŁÓĖćÓ╣üÓĖĪÓ╣łÓ╣ĆÓĖ½ÓĖźÓ╣ćÓĖü
|
F
|
Ó╣üÓĖŻÓĖćÓ╣üÓĖĪÓ╣łÓ╣ĆÓĖ½ÓĖźÓ╣ćÓĖü
|
Q
|
|
ÓĖŚÓĖ▓ÓĖćÓĖüÓĖź
- Ó╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓ╣üÓĖÖÓĖ¦ÓĖĢÓĖŻÓĖć
- Ó╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓ╣üÓĖÜÓĖÜÓĖ½ÓĖĪÓĖĖÓĖÖ
|
Ó╣üÓĖŻÓĖć
Ó╣üÓĖŻÓĖćÓĖÜÓĖ┤ÓĖö
|
F
M
|
ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓ╣ćÓĖ¦
ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓ╣ćÓĖ¦ÓĖŻÓĖŁÓĖÜ
|
w
w
|
|
Ó╣äÓĖ«ÓĖöÓĖŻÓĖŁÓĖźÓĖ┤ÓĖüÓĖ¬Ó╣ī
|
ÓĖøÓĖŻÓĖ┤ÓĖĪÓĖ▓ÓĖĢÓĖŻÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ½ÓĖź
|
V
|
ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖöÓĖ▒ÓĖÖ
|
P
|
|
ÓĖŁÓĖĖÓĖōÓĖ½ÓĖ×ÓĖźÓĖ©ÓĖ▓ÓĖ¬ÓĖĢÓĖŻÓ╣ī
|
ÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ½ÓĖźÓĖéÓĖŁÓĖćÓ╣ĆÓĖŁÓĖÖÓ╣éÓĖŚÓĖŻÓĖøÓĖĄ
|
|
ÓĖŁÓĖĖÓĖōÓĖ½ÓĖĀÓĖ╣ÓĖĪÓĖ┤
|
T
|
ÓĖĢÓĖ▓ÓĖŻÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣ł 2.4 ÓĖĢÓĖ▒ÓĖ¦Ó╣üÓĖøÓĖŻÓĖŚÓĖ▒Ó╣łÓĖ¦Ó╣äÓĖøÓĖŚÓĖĄÓ╣łÓĖ£Ó╣łÓĖ▓ÓĖÖ Ó╣üÓĖźÓĖ░ÓĖéÓ╣ēÓĖ▓ÓĖĪÓĖ¬ÓĖ│ÓĖ½ÓĖŻÓĖ▒ÓĖÜÓĖüÓĖŻÓĖ░ÓĖÜÓĖ¦ÓĖÖÓĖüÓĖ▓ÓĖŻÓĖ×ÓĖŻÓ╣ēÓĖŁÓĖĪÓĖüÓĖ▒ÓĖÜÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ½ÓĖźÓĖéÓĖŁÓĖćÓĖ×ÓĖźÓĖ▒ÓĖćÓĖćÓĖ▓ÓĖÖ
Ó╣āÓĖÖÓĖüÓĖŻÓĖōÓĖĄÓ╣ĆÓĖ½ÓĖźÓ╣łÓĖ▓ÓĖÖÓĖĄÓ╣ē ÓĖ£ÓĖźÓĖŚÓĖĄÓ╣łÓ╣äÓĖöÓ╣ēÓĖéÓĖŁÓĖćÓĖüÓĖ▓ÓĖŻÓĖéÓ╣ēÓĖ▓ÓĖĪ Ó╣üÓĖźÓĖ░ÓĖüÓĖ▓ÓĖŻÓĖ£Ó╣łÓĖ▓ÓĖÖÓĖĢÓĖ▒ÓĖ¦Ó╣üÓĖøÓĖŻ ÓĖŗÓĖČÓ╣łÓĖćÓĖüÓ╣ćÓĖäÓĖĘÓĖŁÓĖüÓĖ│ÓĖźÓĖ▒ÓĖćÓĖćÓĖ▓ÓĖÖ Ó╣éÓĖöÓĖóÓĖĪÓĖĄÓĖüÓĖ▓ÓĖŻÓĖŻÓĖ¦ÓĖĪÓĖüÓĖ▒ÓĖÖÓĖéÓĖŁÓĖćÓĖŻÓĖ░ÓĖÜÓĖÜÓĖĢÓ╣łÓĖ▓ÓĖć Ó╣å Ó╣ĆÓĖ×ÓĖĘÓ╣łÓĖŁÓĖüÓĖ▓ÓĖŻÓĖüÓĖ│ÓĖ½ÓĖÖÓĖöÓĖéÓĖŁÓĖćÓ╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓĖüÓĖŻÓĖ▓ÓĖ¤ÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖŖÓĖĘÓ╣łÓĖŁÓĖĪÓ╣éÓĖóÓĖćÓĖüÓĖ▒ÓĖÖÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖĪÓĖ▓ÓĖĢÓĖŻÓĖÉÓĖ▓ÓĖÖ
ÓĖÖÓĖŁÓĖüÓĖłÓĖ▓ÓĖüÓĖÖÓĖĄÓ╣ē Ó╣āÓĖÖÓĖüÓĖ▓ÓĖŻÓĖÜÓĖ¦ÓĖÖÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ«ÓĖöÓĖŻÓĖŁÓĖźÓĖ┤ÓĖüÓĖ¬Ó╣īÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓĖéÓĖŁÓĖćÓ╣äÓĖ½ÓĖźÓĖŁÓĖ▒ÓĖöÓĖĢÓĖ▒ÓĖ¦Ó╣äÓĖöÓ╣ē Ó╣üÓĖźÓĖ░ÓĖüÓĖŻÓĖ░ÓĖÜÓĖ¦ÓĖÖÓĖüÓĖ▓ÓĖŻÓĖŚÓĖ▓ÓĖćÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖŻÓ╣ēÓĖŁÓĖÖ ÓĖĢÓĖ▒ÓĖ¦Ó╣üÓĖøÓĖŻÓ╣ĆÓĖ½ÓĖźÓ╣łÓĖ▓ÓĖÖÓĖĄÓ╣ēÓĖ¬ÓĖ▓ÓĖĪÓĖ▓ÓĖŻÓĖ¢ÓĖüÓĖ│ÓĖ½ÓĖÖÓĖöÓĖ¢ÓĖČÓĖćÓĖ£ÓĖźÓĖźÓĖ▒ÓĖ×ÓĖśÓ╣īÓ╣āÓĖÖ ÓĖüÓĖ│ÓĖźÓĖ▒ÓĖćÓĖćÓĖ▓ÓĖÖ ÓĖöÓĖ▒ÓĖćÓ╣üÓĖ¬ÓĖöÓĖćÓ╣āÓĖ½Ó╣ēÓ╣ĆÓĖ½Ó╣ćÓĖÖÓ╣āÓĖÖÓĖĢÓĖ▓ÓĖŻÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣ł 2.4 ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓ╣äÓĖŻÓĖüÓ╣ćÓĖĢÓĖ▓ÓĖĪ ÓĖüÓĖ▓ÓĖŻÓ╣āÓĖŖÓ╣ēÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ½ÓĖźÓĖéÓĖŁÓĖćÓĖĪÓĖ¦ÓĖź Ó╣üÓĖźÓĖ░ÓĖüÓĖ▓ÓĖŻÓ╣äÓĖ½ÓĖźÓĖéÓĖŁÓĖćÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖŻÓ╣ēÓĖŁÓĖÖ Ó╣äÓĖĪÓ╣łÓ╣äÓĖöÓ╣ēÓĖ¢ÓĖ╣ÓĖüÓĖÖÓĖ│Ó╣äÓĖøÓĖøÓĖÅÓĖ┤ÓĖÜÓĖ▒ÓĖĢÓĖ┤Ó╣āÓĖÖÓĖŚÓĖ▓ÓĖćÓĖ¦ÓĖ┤ÓĖ©ÓĖ¦ÓĖüÓĖŻÓĖŻÓĖĪ
ÓĖ¢Ó╣ēÓĖ▓ÓĖĢÓĖ▒ÓĖ¦Ó╣üÓĖøÓĖŻÓ╣ĆÓĖ½ÓĖźÓ╣łÓĖ▓ÓĖÖÓĖĄÓ╣ēÓĖŚÓĖĄÓ╣łÓĖ¢ÓĖ╣ÓĖüÓĖÖÓĖ│ÓĖĪÓĖ▓Ó╣āÓĖŖÓ╣ē Ó╣ĆÓĖŻÓĖĄÓĖóÓĖüÓĖ¦Ó╣łÓĖ▓ ÓĖüÓĖŻÓĖ▓ÓĖ¤ÓĖ×ÓĖ▒ÓĖÖÓĖśÓĖ░Ó╣ĆÓĖŚÓĖĄÓĖóÓĖĪ (Pseudo bond graphs) ÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓĖüÓĖÄÓĖ×ÓĖ┤Ó╣ĆÓĖ©ÓĖ® ÓĖ¬Ó╣łÓĖćÓĖ£ÓĖźÓ╣āÓĖ½Ó╣ēÓ╣ĆÓĖüÓĖ┤ÓĖöÓĖüÓĖ▓ÓĖŻÓĖŁÓĖŁÓĖüÓĖłÓĖ▓ÓĖüÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓĖĄÓĖóÓĖÜÓĖćÓ╣łÓĖ▓ÓĖóÓĖéÓĖŁÓĖćÓĖüÓĖŻÓĖ▓ÓĖ¤ÓĖ×ÓĖ▒ÓĖÖÓĖśÓĖ░ÓĖĪÓĖ▓ÓĖĢÓĖŻÓĖÉÓĖ▓ÓĖÖ ÓĖüÓĖŻÓĖ▓ÓĖ¤ÓĖ×ÓĖ▒ÓĖÖÓĖśÓĖ░ÓĖÖÓĖ│Ó╣äÓĖøÓĖ¬ÓĖ╣Ó╣łÓĖÖÓĖ▓ÓĖĪÓĖśÓĖŻÓĖŻÓĖĪÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖŻÓĖ░ÓĖöÓĖ▒ÓĖÜÓĖ¬ÓĖ╣ÓĖć ÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖóÓĖĘÓĖöÓĖ½ÓĖóÓĖĖÓ╣łÓĖÖ Ó╣üÓĖźÓĖ░ÓĖĢÓ╣ēÓĖŁÓĖćÓ╣ĆÓĖ×ÓĖ┤Ó╣łÓĖĪÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖ×ÓĖóÓĖ▓ÓĖóÓĖ▓ÓĖĪÓ╣āÓĖÖÓĖéÓĖ▒Ó╣ēÓĖÖÓĖĢÓĖŁÓĖÖ ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖŁÓĖ▒ÓĖźÓĖüÓĖŁÓĖŻÓĖ┤ÓĖŚÓĖČÓĖĪÓĖéÓĖŁÓĖćÓĖüÓĖ▓ÓĖŻÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓ╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖć
Ó╣ĆÓĖ×ÓĖŻÓĖ▓ÓĖ░ÓĖēÓĖ░ÓĖÖÓĖ▒Ó╣ēÓĖÖ ÓĖ×ÓĖ¦ÓĖüÓĖĪÓĖ▒ÓĖÖÓĖłÓĖČÓĖćÓ╣äÓĖĪÓ╣łÓ╣ĆÓĖ½ÓĖĪÓĖ▓ÓĖ░ÓĖŚÓĖĄÓ╣łÓĖłÓĖ░Ó╣ĆÓĖøÓ╣ćÓĖÖÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖĪÓĖĘÓĖŁÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖ½ÓĖĪÓĖ▓ÓĖ░ÓĖ¬ÓĖĪÓĖ×ÓĖŁÓĖŚÓĖĄÓ╣łÓ╣āÓĖŖÓ╣ēÓ╣āÓĖÖÓĖŻÓĖ░ÓĖÜÓĖÜÓ╣üÓĖĪÓĖäÓĖ▓ÓĖŚÓĖŻÓĖŁÓĖÖÓĖ┤ÓĖüÓĖ¬Ó╣ī ÓĖÖÓĖŁÓĖüÓĖłÓĖ▓ÓĖüÓĖÖÓĖĄÓ╣ē ÓĖüÓĖ▓ÓĖŻÓĖŚÓĖ│ÓĖćÓĖ▓ÓĖÖÓĖŚÓĖĄÓ╣łÓĖÖÓ╣łÓĖ▓Ó╣ĆÓĖÜÓĖĘÓ╣łÓĖŁ ÓĖäÓĖĘÓĖŁÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖłÓĖ│Ó╣ĆÓĖøÓ╣ćÓĖÖÓĖŚÓĖĄÓ╣łÓĖłÓĖ░ÓĖĢÓ╣ēÓĖŁÓĖćÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓĖÜÓĖźÓ╣ćÓĖŁÓĖüÓ╣äÓĖöÓĖŁÓĖ░Ó╣üÓĖüÓĖŻÓĖĪ ÓĖłÓĖ▓ÓĖüÓĖéÓ╣ēÓĖŁÓĖüÓĖ│ÓĖ½ÓĖÖÓĖöÓ╣üÓĖŻÓĖüÓĖéÓĖŁÓĖćÓĖÜÓĖźÓ╣ćÓĖŁÓĖüÓĖéÓĖ▓Ó╣ĆÓĖéÓ╣ēÓĖ▓ / ÓĖéÓĖ▓ÓĖŁÓĖŁÓĖü ÓĖŚÓĖĄÓ╣łÓ╣äÓĖĪÓ╣łÓ╣ĆÓĖ½ÓĖĪÓĖ▓ÓĖ░ÓĖ¬ÓĖĪ
ÓĖüÓĖ▓ÓĖŻÓĖ×ÓĖ▒ÓĖÆÓĖÖÓĖ▓Ó╣äÓĖöÓ╣ēÓĖÖÓĖ│Ó╣äÓĖøÓĖ¬ÓĖ╣Ó╣łÓĖüÓĖ▓ÓĖŻÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓ╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓ╣ĆÓĖŖÓĖ┤ÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖŁÓĖóÓĖ╣Ó╣ł Ó╣āÓĖÖÓ╣üÓĖÖÓĖ¦ÓĖŚÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣łÓĖŗÓĖČÓ╣łÓĖćÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖĪÓĖĄÓĖéÓĖ▒Ó╣ēÓĖ¦ÓĖŚÓĖĄÓ╣łÓĖüÓĖ│ÓĖ½ÓĖÖÓĖöÓ╣äÓĖ¦Ó╣ē Ó╣éÓĖöÓĖóÓ╣äÓĖĪÓ╣łÓĖĢÓ╣ēÓĖŁÓĖćÓĖ¬ÓĖĪÓĖĪÓĖĢÓĖ┤ÓĖ¬ÓĖ┤Ó╣łÓĖćÓĖŚÓĖĄÓ╣łÓĖüÓ╣łÓĖŁÓ╣āÓĖ½Ó╣ēÓ╣ĆÓĖüÓĖ┤ÓĖöÓĖ¬ÓĖ¢ÓĖ▓ÓĖÖÓĖ░ÓĖéÓĖ▒Ó╣ēÓĖÖÓĖ×ÓĖĘÓ╣ēÓĖÖÓĖÉÓĖ▓ÓĖÖ ÓĖłÓĖ▓ÓĖüÓĖÖÓĖ▒Ó╣ēÓĖÖ Ó╣üÓĖ£ÓĖÖÓĖĀÓĖ▓ÓĖ×ÓĖ¦ÓĖ▒ÓĖĢÓĖ¢ÓĖĖÓĖłÓĖ░Ó╣ĆÓĖøÓ╣ćÓĖÖÓĖüÓĖ▓ÓĖŻÓ╣üÓĖ¬ÓĖöÓĖćÓĖĀÓĖ▓ÓĖ×ÓĖüÓĖŻÓĖ▓ÓĖ¤ÓĖ┤ÓĖü ÓĖŚÓĖĄÓ╣łÓĖóÓĖ▒ÓĖćÓĖäÓĖćÓĖŻÓĖ▒ÓĖüÓĖ®ÓĖ▓ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖéÓ╣ēÓĖ▓Ó╣āÓĖłÓĖéÓĖŁÓĖćÓĖŁÓĖćÓĖäÓ╣īÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖŚÓĖ▓ÓĖćÓĖüÓĖ▓ÓĖóÓĖĀÓĖ▓ÓĖ×Ó╣üÓĖÜÓĖÜÓ╣ĆÓĖöÓĖ┤ÓĖĪ
ÓĖöÓĖ▒ÓĖćÓĖÖÓĖ▒Ó╣ēÓĖÖ ÓĖüÓĖ▓ÓĖŻÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓ╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓ╣āÓĖÖÓĖŚÓĖ▓ÓĖćÓĖŚÓĖżÓĖ®ÓĖÅÓĖĄÓĖéÓĖŁÓĖćÓĖŻÓĖ░ÓĖÜÓĖÜÓ╣üÓĖĪÓĖäÓĖ▓ÓĖŚÓĖŻÓĖŁÓĖÖÓĖ┤ÓĖüÓĖ¬Ó╣ī ÓĖöÓ╣ēÓĖ¦ÓĖóÓĖüÓĖ▓ÓĖŻÓĖŻÓĖ¦ÓĖĪÓĖüÓĖ▒ÓĖÖÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓ╣éÓĖøÓĖŻÓ╣łÓĖćÓ╣äÓĖ¬ Ó╣üÓĖźÓĖ░ÓĖĪÓĖĄÓĖéÓĖ▒Ó╣ēÓĖÖÓĖĢÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓĖóÓĖĘÓĖöÓĖ½ÓĖóÓĖĖÓ╣łÓĖÖ (ÓĖłÓĖ▓ÓĖüÓĖŁÓĖćÓĖäÓ╣īÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖ×ÓĖĘÓ╣ēÓĖÖÓĖÉÓĖ▓ÓĖÖÓĖéÓĖŁÓĖćÓĖéÓĖŁÓĖÜÓ╣ĆÓĖéÓĖĢÓĖŚÓĖĄÓ╣łÓ╣üÓĖĢÓĖüÓĖĢÓ╣łÓĖ▓ÓĖćÓ╣äÓĖøÓĖ¢ÓĖČÓĖćÓĖüÓĖ▓ÓĖŻÓĖłÓĖ│ÓĖźÓĖŁÓĖć) ÓĖŗÓĖČÓ╣łÓĖćÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖŚÓ╣ēÓĖ▓ÓĖŚÓĖ▓ÓĖóÓĖ¬ÓĖ│ÓĖ½ÓĖŻÓĖ▒ÓĖÜÓĖüÓĖ▓ÓĖŻÓĖ×ÓĖ▒ÓĖÆÓĖÖÓĖ▓ÓĖĢÓ╣łÓĖŁÓ╣äÓĖøÓ╣āÓĖÖÓĖŁÓĖÖÓĖ▓ÓĖäÓĖĢ
ÓĖŁÓĖćÓĖäÓ╣īÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖłÓĖ│ÓĖÖÓĖ¦ÓĖÖÓĖĪÓĖ▓ÓĖüÓ╣üÓĖ¬ÓĖöÓĖćÓĖŁÓĖŁÓĖüÓĖĪÓĖ▓Ó╣üÓĖÜÓĖÜÓ╣äÓĖĪÓ╣łÓ╣ĆÓĖŖÓĖ┤ÓĖćÓ╣ĆÓĖ¬Ó╣ēÓĖÖ Ó╣üÓĖźÓĖ░Ó╣äÓĖĪÓ╣łÓ╣éÓĖöÓĖóÓĖĢÓĖŻÓĖć (ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖ¬ÓĖĄÓĖóÓĖöÓĖŚÓĖ▓ÓĖÖ Ó╣üÓĖźÓĖ░ÓĖüÓĖ▓ÓĖŻÓĖŻÓĖĖÓĖüÓĖüÓĖźÓĖ▒ÓĖÜ) ÓĖ¬ÓĖ│ÓĖ½ÓĖŻÓĖ▒ÓĖÜÓĖüÓĖŻÓĖ░ÓĖÜÓĖ¦ÓĖÖÓĖüÓĖ▓ÓĖŻÓĖéÓĖŁÓĖćÓĖŖÓĖ┤Ó╣ēÓĖÖÓĖ¬Ó╣łÓĖ¦ÓĖÖÓĖŚÓĖĄÓ╣łÓĖŗÓĖ▒ÓĖÜÓĖŗÓ╣ēÓĖŁÓĖÖ Ó╣üÓĖźÓĖ░ÓĖüÓĖ▓ÓĖŻÓĖŚÓĖ│Ó╣üÓĖ£ÓĖÖÓĖŚÓĖĄÓ╣łÓĖ½ÓĖźÓĖ▓ÓĖóÓĖĪÓĖ┤ÓĖĢÓĖ┤ÓĖĪÓĖ▓ÓĖüÓĖüÓĖ¦Ó╣łÓĖ▓ÓĖÖÓĖĄÓ╣ē ÓĖóÓĖüÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓ╣ĆÓĖŖÓ╣łÓĖÖ Ó╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖóÓĖÖÓĖĢÓ╣īÓ╣ĆÓĖ£ÓĖ▓Ó╣äÓĖ½ÓĖĪÓ╣ē, ÓĖ×ÓĖżÓĖĢÓĖ┤ÓĖüÓĖŻÓĖŻÓĖĪÓĖéÓĖŁÓĖćÓĖóÓĖ▓ÓĖć ÓĖĢÓ╣ēÓĖŁÓĖćÓĖŚÓĖ│ÓĖćÓĖ▓ÓĖÖÓ╣éÓĖöÓĖóÓĖüÓĖ▓ÓĖŻÓĖÜÓĖ╣ÓĖŻÓĖōÓĖ▓ÓĖüÓĖ▓ÓĖŻÓĖŻÓ╣łÓĖ¦ÓĖĪÓĖüÓĖ▒ÓĖÖ
ÓĖŻÓĖ╣ÓĖøÓĖüÓĖ▓ÓĖŻÓĖŚÓĖ│ÓĖćÓĖ▓ÓĖÖÓĖÜÓĖ╣ÓĖŻÓĖōÓĖ▓ÓĖüÓĖ▓ÓĖŻÓĖŻÓ╣łÓĖ¦ÓĖĪÓĖüÓĖ▒ÓĖÖÓĖéÓĖŁÓĖćÓĖŻÓĖ░ÓĖÜÓĖÜÓĖĢÓ╣łÓĖ▓ÓĖć Ó╣å Ó╣āÓĖÖÓĖóÓĖ▓ÓĖÖÓĖóÓĖÖÓĖĢÓ╣ī
ÓĖ¬ÓĖ│ÓĖ½ÓĖŻÓĖ▒ÓĖÜÓĖüÓĖ▓ÓĖŻÓĖĢÓĖŻÓĖ¦ÓĖłÓĖ¬ÓĖŁÓĖÜÓ╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓ╣āÓĖÖÓĖŚÓĖ▓ÓĖćÓĖŚÓĖżÓĖ®ÓĖÅÓĖĄ ÓĖĪÓĖĄÓĖ½ÓĖźÓĖ▓ÓĖóÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣łÓĖŻÓĖ╣Ó╣ēÓĖłÓĖ▒ÓĖüÓĖüÓĖ▒ÓĖÖÓĖöÓĖĄ Ó╣ĆÓĖøÓ╣ćÓĖÖÓĖ¦ÓĖ┤ÓĖśÓĖĄÓĖüÓĖ▓ÓĖŻÓĖŻÓĖ░ÓĖÜÓĖĖÓĖŻÓĖ▓ÓĖóÓĖźÓĖ░Ó╣ĆÓĖŁÓĖĄÓĖóÓĖöÓĖŚÓĖĄÓ╣łÓĖ¬ÓĖ▓ÓĖĪÓĖ▓ÓĖŻÓĖ¢ÓĖÖÓĖ│ÓĖĪÓĖ▓Ó╣āÓĖŖÓ╣ēÓ╣äÓĖöÓ╣ē Ó╣ĆÓĖŖÓ╣łÓĖÖ ÓĖüÓĖ▓ÓĖŻÓĖ¦ÓĖ┤Ó╣ĆÓĖäÓĖŻÓĖ▓ÓĖ░ÓĖ½Ó╣īÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖ¬ÓĖ▒ÓĖĪÓĖ×ÓĖ▒ÓĖÖÓĖśÓ╣ī (Correlation analysis) Ó╣üÓĖźÓĖ░ÓĖüÓĖ▓ÓĖŻÓĖ¦ÓĖ▒ÓĖöÓĖĢÓĖŁÓĖÜÓĖ¬ÓĖÖÓĖŁÓĖćÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖ¢ÓĖĄÓ╣ł (Frequency response) ÓĖ½ÓĖŻÓĖĘÓĖŁ ÓĖüÓĖ▓ÓĖŻÓĖ¦ÓĖ┤Ó╣ĆÓĖäÓĖŻÓĖ▓ÓĖ░ÓĖ½Ó╣īÓĖ¤ÓĖ╣Ó╣ĆÓĖŻÓĖĄÓĖóÓĖŻÓ╣ī (Fourier analysis) ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖüÓĖ▓ÓĖŻÓĖ¦ÓĖ┤Ó╣ĆÓĖäÓĖŻÓĖ▓ÓĖ░ÓĖ½Ó╣īÓĖ¬Ó╣ĆÓĖøÓĖüÓĖĢÓĖŻÓĖ▒ÓĖĪ (Spectral analysis)
ÓĖŻÓĖ╣ÓĖøÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖ¦ÓĖ┤ÓĖśÓĖĄÓĖ¦ÓĖ┤Ó╣ĆÓĖäÓĖŻÓĖ▓ÓĖ░ÓĖ½Ó╣īÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖ¬ÓĖ▒ÓĖĪÓĖ×ÓĖ▒ÓĖÖÓĖśÓ╣ī
ÓĖŻÓĖ╣ÓĖøÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖ¦ÓĖ┤ÓĖśÓĖĄÓĖüÓĖ▓ÓĖŻÓĖ¦ÓĖ▒ÓĖöÓĖĢÓĖŁÓĖÜÓĖ¬ÓĖÖÓĖŁÓĖćÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖ¢ÓĖĄÓ╣ł
ÓĖŻÓĖ╣ÓĖøÓĖ¦ÓĖ┤ÓĖśÓĖĄÓĖüÓĖ▓ÓĖŻÓĖ¦ÓĖ┤Ó╣ĆÓĖäÓĖŻÓĖ▓ÓĖ░ÓĖ½Ó╣īÓĖ¬Ó╣ĆÓĖøÓĖüÓĖĢÓĖŻÓĖ▒ÓĖĪ
Ó╣ĆÓĖÖÓĖĘÓ╣łÓĖŁÓĖćÓĖłÓĖ▓ÓĖüÓĖ×ÓĖ▓ÓĖŻÓĖ▓ÓĖĪÓĖ┤Ó╣ĆÓĖĢÓĖŁÓĖŻÓ╣īÓĖÜÓĖ▓ÓĖćÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓ╣äÓĖĪÓ╣łÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖŚÓĖĄÓ╣łÓĖŻÓĖ╣Ó╣ēÓĖłÓĖ▒ÓĖü ÓĖ½ÓĖŻÓĖĘÓĖŁÓ╣ĆÓĖøÓĖźÓĖĄÓ╣łÓĖóÓĖÖÓ╣üÓĖøÓĖźÓĖćÓ╣äÓĖøÓĖĢÓĖ▓ÓĖĪÓ╣ĆÓĖ¦ÓĖźÓĖ▓ ÓĖ¦ÓĖ┤ÓĖśÓĖĄÓĖüÓĖ▓ÓĖŻÓĖøÓĖŻÓĖ░Ó╣ĆÓĖĪÓĖ┤ÓĖÖÓĖäÓ╣łÓĖ▓ÓĖ×ÓĖ▓ÓĖŻÓĖ▓ÓĖĪÓĖ┤Ó╣ĆÓĖĢÓĖŁÓĖŻÓ╣īÓĖ¬ÓĖ▓ÓĖĪÓĖ▓ÓĖŻÓĖ¢ÓĖÖÓĖ│ÓĖĪÓĖ▓ÓĖøÓĖŻÓĖ░ÓĖóÓĖĖÓĖüÓĖĢÓ╣īÓ╣āÓĖŖÓ╣ēÓ╣äÓĖöÓ╣ē ÓĖŚÓĖ▒Ó╣ēÓĖćÓĖ¬ÓĖ│ÓĖ½ÓĖŻÓĖ▒ÓĖÜÓ╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓ╣ĆÓĖ¦ÓĖźÓĖ▓ÓĖĢÓ╣łÓĖŁÓ╣ĆÓĖÖÓĖĘÓ╣łÓĖŁÓĖć ÓĖ½ÓĖŻÓĖĘÓĖŁÓ╣ĆÓĖ¦ÓĖźÓĖ▓ÓĖŚÓĖĄÓ╣łÓ╣äÓĖĪÓ╣łÓĖĢÓ╣łÓĖŁÓ╣ĆÓĖÖÓĖĘÓ╣łÓĖŁÓĖć (Ó╣éÓĖöÓĖóÓ╣ĆÓĖēÓĖ×ÓĖ▓ÓĖ░ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖóÓĖ┤Ó╣łÓĖć ÓĖ¢Ó╣ēÓĖ▓Ó╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓ╣ĆÓĖøÓ╣ćÓĖÖÓ╣üÓĖÜÓĖÜÓ╣ĆÓĖŖÓĖ┤ÓĖćÓ╣ĆÓĖ¬Ó╣ēÓĖÖÓ╣āÓĖÖÓĖ×ÓĖ▓ÓĖŻÓĖ▓ÓĖĪÓĖ┤Ó╣ĆÓĖĢÓĖŁÓĖŻÓ╣ī)
ÓĖ¬ÓĖ│ÓĖ½ÓĖŻÓĖ▒ÓĖÜÓĖüÓĖ▓ÓĖŻÓĖŻÓĖ░ÓĖÜÓĖĖ Ó╣üÓĖźÓĖ░ÓĖüÓĖ▓ÓĖŻÓĖøÓĖŻÓĖ░ÓĖĪÓĖ▓ÓĖōÓĖäÓ╣łÓĖ▓ÓĖŚÓĖĄÓ╣łÓ╣äÓĖĪÓ╣łÓ╣ĆÓĖŖÓĖ┤ÓĖćÓ╣ĆÓĖ¬Ó╣ēÓĖÖ ÓĖóÓĖüÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖć ÓĖźÓĖ▒ÓĖüÓĖ®ÓĖōÓĖ░ÓĖ½ÓĖźÓĖ▓ÓĖóÓĖĪÓĖ┤ÓĖĢÓĖ┤ (Multi-dimensional), Ó╣ĆÓĖäÓĖŻÓĖĘÓĖŁÓĖéÓ╣łÓĖ▓ÓĖóÓĖøÓĖŻÓĖ░ÓĖ¬ÓĖ▓ÓĖŚÓ╣ĆÓĖŚÓĖĄÓĖóÓĖĪ (Artificial neural networks), ÓĖüÓĖ▓ÓĖŻÓĖŻÓĖ▒ÓĖÜÓĖŻÓĖ╣Ó╣ēÓĖ½ÓĖźÓĖ▓ÓĖóÓĖŖÓĖ▒Ó╣ēÓĖÖ (Multilayer perceptrons) ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖ¤ÓĖ▒ÓĖćÓĖŖÓĖ▒ÓĖÖÓĖüÓ╣īÓĖŻÓĖ▒ÓĖ©ÓĖĪÓĖĄÓĖ×ÓĖĘÓ╣ēÓĖÖÓĖÉÓĖ▓ÓĖÖ (Radial-basis-function) ÓĖ¬ÓĖ▓ÓĖĪÓĖ▓ÓĖŻÓĖ¢ÓĖÖÓĖ│ÓĖĪÓĖ▓ÓĖŁÓĖśÓĖ┤ÓĖÜÓĖ▓ÓĖóÓĖ¬ÓĖ│ÓĖ½ÓĖŻÓĖ▒ÓĖÜÓĖüÓĖŻÓĖ░ÓĖÜÓĖ¦ÓĖÖÓĖüÓĖ▓ÓĖŻÓĖ×ÓĖźÓĖ©ÓĖ▓ÓĖ¬ÓĖĢÓĖŻÓ╣īÓ╣üÓĖÜÓĖÜÓ╣äÓĖĪÓ╣łÓ╣ĆÓĖŖÓĖ┤ÓĖćÓ╣ĆÓĖ¬Ó╣ēÓĖÖÓ╣äÓĖöÓ╣ē
ÓĖŻÓĖ╣ÓĖøÓ╣ĆÓĖäÓĖŻÓĖĘÓĖŁÓĖéÓ╣łÓĖ▓ÓĖóÓĖøÓĖŻÓĖ░ÓĖ¬ÓĖ▓ÓĖŚÓ╣ĆÓĖŚÓĖĄÓĖóÓĖĪ
ÓĖŻÓĖ╣ÓĖøÓĖ¤ÓĖ▒ÓĖćÓĖŖÓĖ▒ÓĖÖÓĖüÓ╣īÓĖŻÓĖ▒ÓĖ©ÓĖĪÓĖĄÓĖ×ÓĖĘÓ╣ēÓĖÖÓĖÉÓĖ▓ÓĖÖ
ÓĖéÓ╣ēÓĖŁÓĖäÓĖ┤ÓĖöÓĖöÓĖĄ Ó╣å ÓĖŚÓĖĄÓ╣łÓĖÖÓĖ│ÓĖĪÓĖ▓ÓĖØÓĖ▓ÓĖü
“ÓĖ½ÓĖĪÓĖ▓Ó╣äÓĖĪÓ╣łÓ╣ĆÓĖäÓĖóÓ╣éÓĖüÓĖŻÓĖś ÓĖ½ÓĖĪÓĖ▓Ó╣äÓĖĪÓ╣łÓ╣ĆÓĖäÓĖóÓ╣ĆÓĖüÓĖźÓĖĄÓĖóÓĖö Ó╣ĆÓĖ¦ÓĖźÓĖ▓ÓĖŚÓĖĄÓ╣łÓĖäÓĖĖÓĖō ÓĖĢÓĖĄ Ó╣ĆÓĖĢÓĖ░ ÓĖĢÓĖÜ ÓĖ½ÓĖĪÓĖ▓
ÓĖ½ÓĖĪÓĖ▓ÓĖÜÓĖ▓ÓĖćÓĖĢÓĖ▒ÓĖ¦ ÓĖÖÓĖŁÓĖÖÓ╣āÓĖ½Ó╣ēÓĖĢÓĖĄÓ╣éÓĖöÓĖóÓ╣äÓĖĪÓ╣łÓĖ½ÓĖÖÓĖĄ ÓĖüÓ╣ćÓĖłÓĖ░Ó╣āÓĖ½Ó╣ēÓĖ½ÓĖĪÓĖ▓ ÓĖ½ÓĖÖÓĖĄÓ╣äÓĖøÓ╣äÓĖ½ÓĖÖÓ╣äÓĖöÓ╣ēÓĖźÓ╣łÓĖ░?
Ó╣ĆÓĖ×ÓĖŻÓĖ▓ÓĖ░ÓĖäÓĖÖÓĖŚÓĖĄÓ╣łÓĖ½ÓĖĪÓĖ▓ÓĖŻÓĖ▒ÓĖü Ó╣üÓĖźÓĖ░ÓĖ½ÓĖĪÓĖ▓ÓĖäÓĖ┤ÓĖöÓĖ¦Ó╣łÓĖ▓ ÓĖŁÓĖóÓĖ╣Ó╣łÓĖöÓ╣ēÓĖ¦ÓĖóÓ╣üÓĖźÓ╣ēÓĖ¦ÓĖøÓĖźÓĖŁÓĖöÓĖĀÓĖ▒ÓĖóÓĖŚÓĖĄÓ╣łÓĖ¬ÓĖĖÓĖö
ÓĖäÓĖĘÓĖŁ ÓĖäÓĖÖÓĖŚÓĖĄÓ╣łÓĖüÓĖ│ÓĖźÓĖ▒ÓĖćÓĖĢÓĖĄÓ╣ĆÓĖéÓĖ▓ÓĖŁÓĖóÓĖ╣Ó╣łÓĖĢÓĖŻÓĖćÓĖÖÓĖĄÓ╣ē”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}