2.2.2 āļāļēāļĢāļāļĢāļąāļāļāļĢāļļāļāļāļļāļāļŠāļĄāļāļąāļāļīāļāļēāļĢāļāļģāļāļēāļ
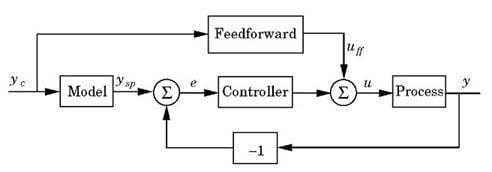
āđāļāļĒāđāļāđāļāļēāļĢāļāļģāļāļēāļāļāļ§āļāļāļļāļĄāđāļāļāļāđāļāļāļāļĨāļąāļ āļāļēāļĢāļāļ§āļāļāļļāļĄāđāļāļāļāļĩāđāđāļĄāđāđāļāļĩāļĒāļāđāļāđāļāļ°āļāļ§āļēāļĄāđāļĄāđāļāļĒāļģāđāļāļāļēāļĢāļāļģāļāļēāļāļāļāļāļāļĨāđāļāđāļāđāļēāļāļąāđāļ āđāļāđāļĒāļąāļāđāļāđāļāļāļēāļĢāļāļ§āļāļāļļāļĄāđāļāļāļāļēāļĢāļāļģāļāļēāļāđāļāļāđāļēāļāļŦāļāđāļē (Feedforward) āļāļāļāļŠāđāļ§āļāļāļĢāļ°āļāļāļāļāļēāļāļāļĨ
āļĢāļđāļāļāļąāļ§āļāļĒāđāļēāļāļāļąāļāļāļēāļĢāļāļģāļāļēāļāđāļāļāđāļēāļāļŦāļāđāļē
āđāļāļ°āļāļģāđāļāļ·āđāļāđāļŦāđāļāđāļēāļāđāļāđāļāđāļāđāļāļ·āđāļāļāđāļŦāđ āļāļĨāļīāļāļāļ§āļēāđāļĨāļ·āļāļ Open link in new window
āđāļāļĒāļĄāļĩāļāļēāļĢāđāļāļĩāļĒāļāļāļąāļāđāļāļĢāđāļāļĢāļĄ āđāļĨāļ°āļāļēāļĢāļāļ§āļāļāļļāļĄāļāļēāļĢāļ§āļąāļāļāđāļēāļāļāļīāļāļāļĩāđāļĄāļĩāļĄāļēāļāļĄāļēāļĒ āđāļāļĢāļēāļ°āļāļ°āļāļąāđāļ āļāļ§āļēāļĄāđāļĄāđāļāļĒāļģāļāļāļāđāļāļĢāļ·āđāļāļāļāļĨ āđāļĨāļ°āļĢāļ°āļāļāļāļēāļĢāļāļĨāļīāļāļāļēāļāļĨāļāļĨāļāđāļāļāđāļēāļ āđāļāđāļāđāļĄāļĩāļĢāļđāļāđāļāļāļāļēāļĢāļŠāļĢāđāļēāļāļāļĩāđāđāļĢāļĩāļĒāļāļāđāļēāļĒ āđāļāļĒāđāļāđāļāļāļēāļĢāđāļāđāđāļāļĢāļīāđāļ āļŦāļĢāļ·āļāļĢāļēāļāđāļĨāļ·āđāļāļāđāļāđāļēāļĄāļē
āļŠāļīāđāļāļŠāļģāļāļąāļāļāđāļāļ·āļ āļĄāļĩāļāļēāļĢāļāļāđāļāļĒāđāļĢāļāđāļŠāļĩāļĒāļāļāļēāļāļāļĩāđāļĄāļĩāļāļ§āļēāļĄāđāļāļāļāđāļēāļāļāļąāļāļĄāļēāļ āđāļĄāļ·āđāļāđāļāļĩāļĒāļāļāļąāļāđāļ§āļĨāļē āđāļāļĒāļāļēāļĢāđāļāđāļ§āļīāļāļĩāļāļēāļĢ āļāļĢāļąāļāļāļĢāļļāļāļāļāđāļāļĒāļāļ§āļēāļĄāđāļŠāļĩāļĒāļāļāļēāļ (Adaptive friction compensation) āļāļāļāļāļēāļāļāļĩāđāļāđāļēāđāļāļīāļāđāļĢāļāđāļŠāļĩāļĒāļāļāļēāļāļāļĩāđāļĄāļēāļ āļāļ°āļāļģāđāļŦāđāđāļāļīāļāļāđāļēāđāļāđāļāđāļēāļĒāđāļāļīāđāļĄāļāļķāđāļāļāļēāļāļāļēāļĢāļāļģāļāļēāļāļāļāļāļāļļāļāļāļĢāļāđāđāļāđ āđāļāđāļ āđāļāļ·āļāļ, āđāļāļĢāļīāđāļ
āļŠāđāļ§āļāļĢāļļāđāļāļāļĩāđāđāļāđāđāļāļ āļāļēāļĢāļāļ§āļāļāļļāļĄāļāļēāļĢāļāļĢāļąāļāļāļąāļ§ (Adaptive control) āļāļ°āļĄāļĩāļāļ§āļēāļĄāļŦāļĨāļēāļāļŦāļĨāļēāļĒāļāļāļāļāļēāļĢāļāļģāļāļēāļ āđāļĄāļ·āđāļāđāļāļĩāļĒāļāļāļąāļāļāļēāļĢāļāļ§āļāļāļļāļĄāđāļāļāļāļāļāļĩāđ āļĄāļĩāļāļēāļĢāļāļģāļāļēāļāļāļĩāđāļāđāļēāļāļāđāļ āđāļāđāļāļēāļĢāļāļģāļāļēāļāļĒāļąāļāļĄāļĩāļāļ§āļēāļĄāđāļĄāđāđāļŠāļāļĩāļĒāļĢ āļŦāļĢāļ·āļāļĨāļąāļāļĐāļāļ°āļāļēāļĢāļāļģāļāļēāļāļāļĩāđāļāļ·āļ āļāļēāļĢāļĢāļ§āļĄāļĢāļ°āļāļāđāļāđāļēāļŦāļēāļāļąāļāļāļ°āļāļģāđāļŦāđāļĄāļĩāļāļ§āļēāļĄāļŦāļĨāļēāļāļŦāļĨāļēāļĒāđāļāļāļēāļĢāļāļģāļāļēāļ āđāļāđāļ āļāļģāđāļāđāļāđāđāļāļāļēāļĢāļāļ§āļāļāļļāļĄāļāļēāļĢāđāļŦāļĨ, āđāļĢāļ āļŦāļĢāļ·āļāļāļ§āļēāļĄāđāļĢāđāļ§ āđāļĨāļ°āļāļ§āļāļāļļāļĄāļāļĢāļ°āļāļ§āļāļāļēāļĢāđāļāđāļāļĢāļ·āđāļāļāļĒāļāļāđ, āļĒāļēāļāļĒāļāļāđ āļŦāļĢāļ·āļāļāļēāļāļēāļĻāļĒāļēāļ
āļĢāļđāļāļāļēāļĢāļāļ§āļāļāļļāļĄāđāļāļāļāļĢāļąāļāļāļąāļ§
āļāļĢāļ°āļŠāļīāļāļāļīāļ āļēāļāļāļēāļĢāļāļģāļāļēāļāļāļĩāđāļāļĩāļāļķāđāļāļāđāļ§āļĒāđāļŦāđāļāļēāļĢāļāļ§āļāļāļļāļĄāļāļąāļ§āđāļāļĢāļāđāļēāļāļāļīāļāļāļēāļĢāđāļāļĨāļ·āđāļāļāļāļĩāđāļŠāļēāļĄāļēāļĢāļāļāļģāļāļēāļ āļŠāļēāļĄāļēāļĢāļāļĄāļāļāđāļŦāđāļāđāļāđāđāļāļĒāļāļĢāļ°āļŠāļīāļāļāļīāļ āļēāļ āđāļĨāļ°āļāļĨāļāļĩāđāļāļāļāļāļĨāļąāļāļĄāļēāļāļĩāļāļķāđāļ
2.2.3 āļāļąāļāļāļąāļāļāđāđāļŦāļĄāđāļāļĩāđāđāļāļīāđāļĄāđāļāđāļēāļĄāļē
āļĢāļ°āļāļāđāļĄāļāļēāļāļĢāļāļāļīāļāļŠāđāļāđāļ§āļĒāđāļŦāđāļāļąāļāļāļąāļāļāđāļāļĩāđāļāļ°āđāļāļīāļāļāļķāđāļ āļŠāļēāļĄāļēāļĢāļāļāļģāļāļēāļāđāļāđāđāļŠāļāļĩāļĒāļĢ āđāļāļĢāļ·āđāļāļāļāļĨāđāļāļāļąāļāļāļļāļāļąāļāļāļĩāđāđāļāđāđāļĄāļāļēāļāļĢāļāļāļīāļāļŠāđāļāļ°āļĄāļĩāļāļēāļĢāđāļāđāļāļļāļāļāļĢāļāđāļāļīāļāļīāļāļāļĨāļāļīāđāļĨāđāļāļāļĢāļāļāļīāļāļŠāđāđāļāđāļēāļĄāļēāļāļģāļāļēāļāđāļāļāļĢāļ°āļāļāļāļąāđāļāđāļāļīāļĄ
āđāļāļāļąāđāļāđāļĢāļāļāļĩāđāđāļŦāđāļ āđāļāđāļĄāļāļēāļāļĢāļāļāļīāļāļŠāđāđāļĄāđāļĄāļĩāļāļēāļĢāļ§āļąāļāđāļāđāļāļīāļāļāļĢāļīāļĄāļēāļ āđāļāđāļŠāļēāļĄāļēāļĢāļāļāļģāļāļ§āļāđāļāļāļ·āđāļāļāļēāļāļāļāļāļŠāļąāļāļāļēāļāļāļēāļĢāļ§āļąāļ āđāļĨāļ°āđāļāđāļĢāļąāļāļāļīāļāļāļīāļāļĨāļāļēāļāļāļēāļĢāļāļ§āļāļāļļāļĄāđāļāļāđāļāļāđāļēāļāļŦāļāđāļē āļŦāļĢāļ·āļāļāđāļāļāļāļĨāļąāļ āļĒāļāļāļąāļ§āļāļĒāđāļēāļ āļāļ·āļ āļāļąāļ§āđāļāļĢāļāļĩāđāļāļķāđāļāļāļąāļāđāļ§āļĨāļē (Time-dependent variables) āđāļāđāļ āļāļēāļĢāļĨāļ·āđāļāđāļāļĨāļāļāļāļĨāđāļ, āļāļ§āļēāļĄāļĒāļ·āļāļŦāļĒāļļāđāļāļ āļēāļĒāđāļ, āļāļļāļāļŦāļ āļđāļĄāļī, āļĄāļļāļĄāđāļāļĨ āđāļĨāļ°āļāļ§āļēāļĄāđāļĢāđāļ§āđāļāļāļēāļĢāļāļ§āļāļāļļāļĄāļāļ§āļāļĄāļēāļĨāļąāļĒāļāļāļāļĒāļēāļāļĒāļāļāđ āļŦāļĢāļ·āļāļāļąāļāļāļąāļĒāļāļĩāđāļāļģāļŦāļāļāļāļēāļāļēāļĻāļāļ·āđāļ, āļŠāļąāļĄāļāļĢāļ°āļŠāļīāļāļāļīāđāļāļ§āļēāļĄāđāļāđāļāđāļāļĢāđāļ āđāļĨāļ°āļāļ§āļēāļĄāļāđāļēāļāļāļēāļ
āļāļēāļĢāļāļĢāļąāļāļāļąāļ§āļāļāļāļāđāļēāļāļēāļĢāļēāļĄāļīāđāļāļāļĢāđ (Adaptation of parameters) āđāļāđāļ āļāļ§āļēāļĄāļāļ·āđāļ āđāļĨāļ°āļāļ§āļēāļĄāđāļāđāļāđāļāļĢāđāļāļŠāļģāļŦāļĢāļąāļāļĢāļ°āļāļāļāļēāļĢāļŠāļąāđāļ (āļāļķāđāļāļāļĒāļđāđāļāļąāļāļāļēāļĢāļ§āļąāļāļāļāļāļāļēāļĢāļāļāļąāļ āļŦāļĢāļ·āļāļāļ§āļēāļĄāđāļĢāđāļ) āļāļĩāđāļāđāđāļāđāļāļāļĩāļāļŦāļāļķāđāļāļāļąāļ§āļāļĒāđāļēāļ
āļāļēāļĢāļĢāđāļ§āļĄāļāļąāļāļāļđāđāļĨ āđāļĨāļ°āļāļēāļĢāļ§āļīāļāļīāļāļāļąāļĒāļāđāļāļāļīāļāļāļĨāļēāļāļāļ°āļĄāļĩāļĄāļēāļāļāļķāđāļ āđāļĨāļ°āļŠāļģāļāļąāļāļāļķāđāļ āļāļĩāļāļāļąāđāļāļĄāļĩāļāļēāļĢāļāļģāļāļēāļāļāļĩāđāđāļāđāļāļāļąāļāļāļąāļāļāđāļĢāļ°āļāļāļāļąāļāđāļāļĄāļąāļāļī āļāļ°āļāļ§āļēāļĄāļāļąāļāļāđāļāļāļāļĩāđāđāļāļīāđāļĄāļĄāļēāļāļāļķāđāļ āļĄāļĩāļāļ§āļēāļĄāļāđāļēāđāļāļ·āđāļāļāļ·āļ āđāļĨāļ°āļāļ§āļēāļĄāļāļĨāļāļāļ āļąāļĒāļāļĩāđāļŠāļđāļāļāļķāđāļ
āļāļāļāļāļēāļāļāļĩāđāļāļēāļĢāļāļģāļāļēāļāļāļāļāļāļīāđāļāļŠāđāļ§āļāļāļĩāđāļāđāļģāļāđāļāļ, āļĢāļ°āļāļāļāļĢāļąāļāđāļāļĢāļāļŠāļĢāđāļēāļ (Reconfiguration), āļāļēāļĢāļāļģāļĢāļļāļāļĢāļąāļāļĐāļē āđāļĨāļ°āđāļāđāļĨāđāļāļāļĢāđāļ§āļīāļŠ (Teleservice) āļāļāļīāļāļāđāļēāļ āđ
āļĢāļđāļāļāļąāļ§āļāļĒāđāļēāļāļāļēāļāđāļāđāļĨāđāļāļāļĢāđāļ§āļīāļŠ
āļāđāļĒāļīāđāļāļāļģāđāļŦāđāļĢāļ°āļāļāļĄāļĩāļāļ§āļēāļĄāđāļāđāļāļāļąāļāļāļĢāļīāļĒāļ°āļĄāļēāļāļĒāļīāđāļāļāļķāđāļ āļāļēāļĢāļēāļāļāļĩāđ 2.2 āđāļāđāļŠāļĢāļļāļāļĢāļ§āļĄāļāļļāļāļŠāļĄāļāļąāļāļīāļāļēāļāļāļĒāđāļēāļāļāļāļāļĢāļ°āļāļāđāļĄāļāļēāļāļĢāļāļāļīāļāļŠāđ āđāļĄāļ·āđāļāđāļāļĢāļĩāļĒāļāđāļāļĩāļĒāļāļāļąāļāļĢāļ°āļāļāļāļĨāđāļāļāđāļēāđāļāļāļāļĢāļĢāļĄāļāļē
|
āļĢāļ°āļāļāđāļĄāļāļēāļāļĢāļāļāļīāļāļŠāđ
|
āļĢāļ°āļāļāļāļĨāđāļāļāđāļē
|
|
āļāļēāļĢāļāļŠāļĄāļāļŠāļēāļāļāļąāļāļāļāļāļŠāđāļ§āļāļāļĢāļ°āļāļāļ (āļŪāļēāļĢāđāļāđāļ§āļĢāđ)
|
āđāļŠāđāļŠāđāļ§āļāļāļĢāļ°āļāļāļāđāļāļīāđāļĄ
|
|
āđāļĨāđāļāļāļ°āļāļąāļāļĢāļąāļ
|
āļāļāļēāļāđāļŦāļāđāđāļāļāļ°āļāļ°
|
|
āļāļĨāđāļĨāļāļĒāđāļēāļāļāđāļēāļĒ
|
āļāļĨāđāļāļĄāļĩāļāļ§āļēāļĄāļāļąāļāļāđāļāļ
|
|
āđāļāđāļĢāļ°āļāļāļāļąāļŠ āļŦāļĢāļ·āļāļŠāļ·āđāļāļŠāļēāļĢāļĢāļ°āļāļāđāļĢāđāļŠāļēāļĒ
|
āđāļāđāļŠāļēāļĒāđāļ
|
|
āđāļāđāļĨāļ°āļŦāļāđāļ§āļĒāļāļąāļāđāļāļĄāļąāļāļī
|
āļāļēāļĢāđāļāļ·āđāļāļĄāļāđāļāđāļĒāļāļāļąāļ
|
|
āļāļēāļĢāļāļŠāļĄāļāļŠāļēāļāļāļąāļāđāļāļĒāļāļĢāļ°āļāļ§āļāļāļēāļĢāļāđāļāļĄāļđāļĨ (āļāļāļāđāļ§āļĢāđ)
|
āļāļēāļĢāļāļ§āļāļāļļāļĄāļāļĒāđāļēāļāļāđāļēāļĒ
|
|
āđāļāļĢāļāļŠāļĢāđāļēāļāļāļĩāđāļĒāļ·āļāļŦāļĒāļļāđāļāļāļĢāđāļāļĄāļāļąāļāļāļēāļĢāđāļāđāļāļēāļāļĢāđāļ§āļĄāļāļąāļāļāļīāđāļĨāđāļāļāļĢāļāļāļīāļāļŠāđ
|
āđāļāļĢāļāļŠāļĢāđāļēāļāđāļāđāļāđāļāļĢāđāļ
|
|
āļĄāļĩāļāļēāļĢāđāļāļĩāļĒāļāđāļāļĢāđāļāļĢāļĄāđāļāļāļāđāļāļāļāļĨāļąāļāđāļāđ (āđāļĄāđāđāļāđāļāđāļāļāđāļāļīāļāđāļŠāđāļ) āļāļ§āļāļāļļāļĄāđāļāļĒāļāļīāļāļīāļāļāļĨ
|
āļāļ§āļāļāļļāļĄāđāļāļāļāļģāļāļēāļāđāļāļāđāļēāļāļŦāļāđāļē, āļāļ§āļāļāļļāļĄāđāļāļāđāļāļīāļāđāļŠāđāļ (āļāļāļēāļĨāđāļāļ)
|
|
āļāļ§āļēāļĄāđāļĄāđāļāļĒāļģāļāđāļēāļāļāļēāļĢāļ§āļąāļ āđāļĨāļ°āļāļ§āļāļāļļāļĄāđāļāļāļāđāļāļāļāļĨāļąāļ
|
āļāļ§āļēāļĄāđāļāļĩāđāļĒāļāļāļĢāļāđāļĄāđāļāļĒāļģāļāļ°āļĄāļĩāļāđāļēāļāļ§āļēāļĄāđāļāļ·āđāļāļāļĩāđāļāđāļāļĒ
|
|
āļāļ§āļāļāļļāļĄāļāļāļāļāļēāļĢāļāļĢāļ°āļĄāļēāļāļāļĢāļīāļĄāļēāļāđāļĄāđāđāļāđāļāļēāļĢāļ§āļąāļ
|
āļāļĢāļīāļĄāļēāļāļāļēāļĢāļ§āļąāļāđāļĄāđāđāļāđāđāļāļĨāļĩāđāļĒāļāđāļāļĨāļāđāļāđāļāļĒāļāļĨāļāļēāļĢ
|
|
āļĄāļĩāļāļēāļĢāļāļāļĒāļāļđāđāļĨ āđāļĨāļ°āļāļāļĒāļ§āļīāļāļīāļāļāļąāļĒāļāļ§āļēāļĄāļāļīāļāļāļāļāļī
|
āļāļēāļĢāļāļĢāļ§āļāļŠāļāļāļāđāļēāļĒ
|
|
āļĄāļĩāļāļ§āļēāļĄāļŠāļēāļĄāļēāļĢāļāđāļāļāļēāļĢāđāļĢāļĩāļĒāļāļĢāļđāđ
|
āļŠāļēāļĄāļēāļĢāļāļāđāļāļĄāđāļāļĄāđāļāđ
|
āļāļēāļĢāļēāļāļāļĩāđ 2.2 āļāļļāļāļŠāļĄāļāļąāļāļīāļāļĩāđāđāļāļĩāļĒāļāļāļąāļāļāļāļāļĢāļ°āļāļāđāļĄāļāļēāļāļĢāļāļāļīāļāļŠāđāļāļąāļāđāļāļāļāļĢāļĢāļĄāļāļē
āļāđāļāļāļīāļāļāļĩ āđ āļāļĩāđāļāļģāļĄāļēāļāļēāļ
“āļāđāļēāļāļļāļāļāļīāļāļāļ°āđāļāđāļāđāļŦāļāđ āļāļļāļāļāđāļāļ°āđāļāđāđāļāđāļāđāļŦāļāđ
āļāđāļēāļāļļāļāļāļīāļāļāļĒāļēāļāđāļāđāļāļāļ°āđāļĢ āļāļļāļāļāđāļāļ°āđāļāđāđāļāđāļāļŠāļīāđāļāļāļąāđāļ”
āļāļāđāļāđāļ
{kind=link}
{kind=link}
{kind=link}