9.3.2 ÓĖźÓĖ▒ÓĖüÓĖ®ÓĖōÓĖ░ÓĖüÓĖ▓ÓĖŻÓĖŁÓĖŁÓĖüÓ╣üÓĖÜÓĖÜ
ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖĪÓĖĄÓĖźÓĖ▒ÓĖüÓĖ®ÓĖōÓĖ░ÓĖüÓĖ▓ÓĖŻÓĖŁÓĖŁÓĖüÓ╣üÓĖÜÓĖÜÓĖŁÓĖóÓĖ╣Ó╣łÓĖ¬ÓĖŁÓĖćÓĖ½ÓĖźÓĖ▒ÓĖüÓ╣āÓĖ½ÓĖŹÓ╣ł Ó╣å ÓĖĪÓĖĄÓĖöÓĖ▒ÓĖćÓĖÖÓĖĄÓ╣ē
1. ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ Ó╣üÓĖüÓĖÖÓĖäÓ╣ēÓĖ│Ó╣ĆÓĖøÓ╣ćÓĖÖÓ╣üÓĖÜÓĖÜÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī (Telescopic struts) ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖŻÓĖ░ÓĖÜÓĖÜÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź (Ingersoll system)
2. ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ Ó╣üÓĖüÓĖÖÓĖäÓ╣ēÓĖ│Ó╣ĆÓĖøÓ╣ćÓĖÖÓ╣üÓĖÜÓĖÜÓ╣üÓĖŚÓ╣łÓĖćÓĖÜÓĖŁÓĖźÓĖ¬ÓĖüÓĖŻÓĖ╣ (Ball screw struts) ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖŻÓĖ░ÓĖÜÓĖÜÓ╣ĆÓĖ«Ó╣ĆÓĖŗÓĖź Ó╣üÓĖźÓĖ░ÓĖłÓĖĄÓ╣éÓĖŁÓĖöÓĖ┤ÓĖĢÓĖ┤ÓĖü (Hexel & Geodetic system)
9.3.2.1 ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ Ó╣üÓĖüÓĖÖÓĖäÓ╣ēÓĖ│Ó╣ĆÓĖøÓ╣ćÓĖÖÓ╣üÓĖÜÓĖÜÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī
ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ Ó╣üÓĖüÓĖÖÓĖäÓ╣ēÓĖ│Ó╣ĆÓĖøÓ╣ćÓĖÖÓ╣üÓĖÜÓĖÜÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖŻÓĖ░ÓĖÜÓĖÜÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź Ó╣āÓĖÖÓĖüÓĖ▓ÓĖŻÓĖŁÓĖŁÓĖüÓ╣üÓĖÜÓĖÜÓĖüÓĖźÓ╣äÓĖüÓĖŖÓĖÖÓĖ┤ÓĖöÓĖÖÓĖĄÓ╣ē ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖłÓĖ░ÓĖĪÓĖĄÓĖ¬Ó╣łÓĖ¦ÓĖÖÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖéÓĖŁÓĖćÓĖüÓĖŻÓĖ░ÓĖÜÓĖŁÓĖüÓ╣äÓĖ«ÓĖöÓĖŻÓĖŁÓĖźÓĖ┤ÓĖüÓĖ¬Ó╣īÓĖ½ÓĖüÓĖĢÓĖ▒ÓĖ¦, Ó╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī ÓĖ×ÓĖĘÓ╣ēÓĖÖÓĖŚÓĖĄÓ╣łÓĖ½ÓĖÖÓ╣ēÓĖ▓ÓĖĢÓĖ▒ÓĖöÓĖéÓĖŁÓĖćÓ╣üÓĖŚÓ╣łÓĖÖÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣īÓĖŁÓĖ▓ÓĖłÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖ½ÓĖÖÓ╣ēÓĖ▓ÓĖĢÓĖ▒ÓĖöÓ╣üÓĖÜÓĖÜÓĖ¦ÓĖćÓĖüÓĖźÓĖĪ ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖ¬ÓĖĄÓ╣łÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪ ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖŻÓĖ╣ÓĖøÓ╣üÓĖÜÓĖÜÓĖŁÓĖĘÓ╣łÓĖÖ Ó╣å ÓĖüÓ╣ćÓ╣äÓĖöÓ╣ēÓĖéÓĖČÓ╣ēÓĖÖÓĖŁÓĖóÓĖ╣Ó╣łÓĖüÓĖ▒ÓĖÜÓĖüÓĖ▓ÓĖŻÓĖŁÓĖŁÓĖüÓ╣üÓĖÜÓĖÜÓ╣āÓĖŖÓ╣ēÓĖćÓĖ▓ÓĖÖ Ó╣üÓĖźÓ╣ēÓĖ¦ÓĖĪÓĖĄÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░Ó╣āÓĖÖÓĖüÓĖ▓ÓĖŻÓĖŚÓĖĄÓ╣łÓĖłÓĖ░Ó╣āÓĖ½Ó╣ēÓĖĪÓĖĄÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖóÓĖĘÓĖö ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖ½ÓĖöÓĖĢÓĖ▒ÓĖ¦ÓĖŻÓĖ░ÓĖ½ÓĖ¦Ó╣łÓĖ▓ÓĖćÓĖÉÓĖ▓ÓĖÖÓĖ½ÓĖüÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪÓĖŁÓĖóÓĖ╣Ó╣łÓĖüÓĖ▒ÓĖÜÓĖŚÓĖĄÓ╣ł Ó╣üÓĖźÓĖ░Ó╣üÓĖ£Ó╣łÓĖÖÓĖÉÓĖ▓ÓĖÖÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖ¬ÓĖ▓ÓĖĪÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪ
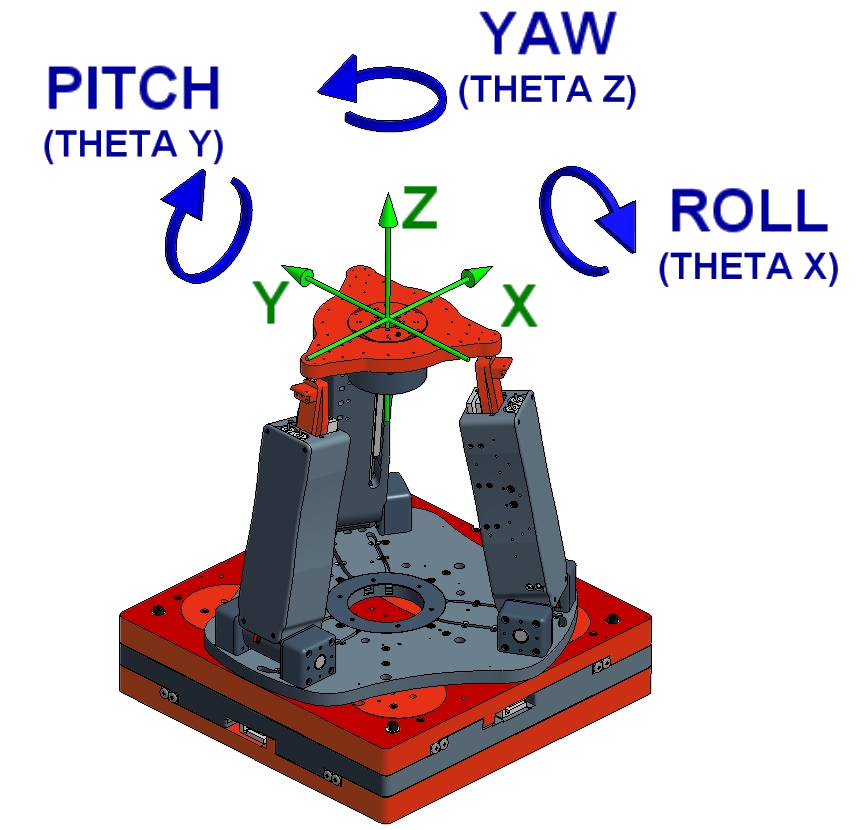
Ó╣üÓĖŚÓ╣łÓĖÖÓĖ¬ÓĖ▓ÓĖĪÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪÓĖŁÓĖśÓĖ┤ÓĖÜÓĖ▓ÓĖóÓĖŁÓĖćÓĖäÓ╣īÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖöÓ╣ēÓĖ▓ÓĖÖÓĖéÓĖ▓ÓĖŁÓĖŁÓĖüÓĖŚÓĖĄÓ╣łÓ╣äÓĖöÓ╣ēÓĖłÓĖ▓ÓĖü ÓĖ½ÓĖüÓĖŁÓĖćÓĖ©ÓĖ▓ÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░ (6 Degrees Of Freedom: DOF) ÓĖéÓĖŁÓĖćÓĖŻÓĖ░ÓĖÜÓĖÜ ÓĖöÓĖ╣ÓĖŚÓĖĄÓ╣łÓĖŻÓĖ╣ÓĖøÓĖöÓ╣ēÓĖ▓ÓĖÖÓĖźÓ╣łÓĖ▓ÓĖć
ÓĖŻÓĖ╣ÓĖøÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź Ó╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣äÓĖöÓ╣ē 6 ÓĖŁÓĖćÓĖ©ÓĖ▓ÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░
Ó╣üÓĖÖÓĖ░ÓĖÖÓĖ│Ó╣ĆÓĖ×ÓĖĘÓ╣łÓĖŁÓ╣āÓĖ½Ó╣ēÓĖŁÓ╣łÓĖ▓ÓĖÖÓ╣äÓĖöÓ╣ēÓĖĢÓ╣łÓĖŁÓ╣ĆÓĖÖÓĖĘÓ╣łÓĖŁÓĖćÓ╣āÓĖ½Ó╣ē ÓĖäÓĖźÓĖ┤ÓĖüÓĖéÓĖ¦ÓĖ▓Ó╣ĆÓĖźÓĖĘÓĖŁÓĖü Open link in new window
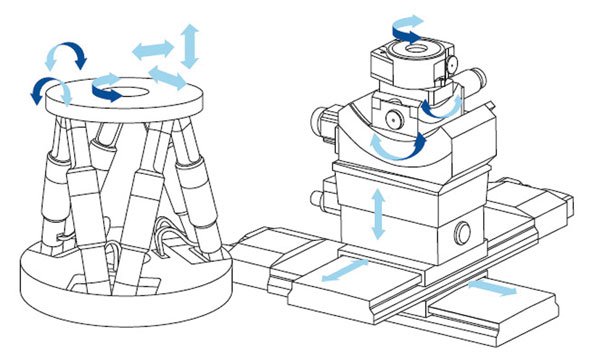
ÓĖŻÓĖ╣ÓĖøÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓ╣ĆÓĖŚÓĖĄÓĖóÓĖÜÓĖüÓĖ▒ÓĖÜÓĖüÓĖźÓ╣äÓĖüÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓĖŚÓĖ▒Ó╣łÓĖ¦Ó╣äÓĖø
ÓĖ¦ÓĖ┤ÓĖöÓĖĄÓ╣éÓĖŁÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖüÓĖźÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ
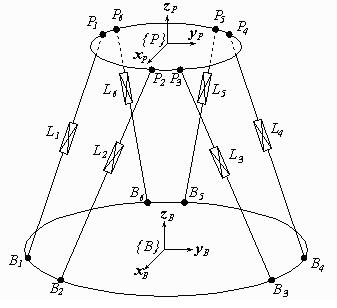
ÓĖøÓĖźÓĖ▓ÓĖóÓĖŚÓĖ▒Ó╣ēÓĖćÓĖ¬ÓĖŁÓĖćÓĖéÓĖŁÓĖćÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī (Telescopic struts) Ó╣äÓĖ«ÓĖöÓĖŻÓĖŁÓĖźÓĖ┤ÓĖüÓĖ¬Ó╣īÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖŖÓĖĘÓ╣łÓĖŁÓĖĪÓ╣éÓĖóÓĖćÓ╣āÓĖÖÓ╣üÓĖĢÓ╣łÓĖźÓĖ░ÓĖÉÓĖ▓ÓĖÖÓĖ¬ÓĖ▓ÓĖĪÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪ ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖÉÓĖ▓ÓĖÖÓ╣éÓĖöÓĖóÓĖéÓ╣ēÓĖŁÓĖĢÓ╣łÓĖŁÓ╣ĆÓĖŁÓĖÖÓĖüÓĖøÓĖŻÓĖ░ÓĖ¬ÓĖćÓĖäÓ╣ī ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖéÓ╣ēÓĖŁÓĖĢÓ╣łÓĖŁÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░ (Universal joints) ÓĖöÓĖ╣ÓĖŚÓĖĄÓ╣łÓĖŻÓĖ╣ÓĖøÓĖöÓ╣ēÓĖ▓ÓĖÖÓĖźÓ╣łÓĖ▓ÓĖć
ÓĖŻÓĖ╣ÓĖøÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī ÓĖüÓĖ▒ÓĖÜÓĖéÓ╣ēÓĖŁÓĖĢÓ╣łÓĖŁÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░
ÓĖŗÓĖČÓ╣łÓĖćÓĖŻÓĖ░ÓĖÜÓĖÜÓĖÖÓĖĄÓ╣ēÓĖ¢ÓĖ╣ÓĖüÓĖÖÓĖ│ÓĖĪÓĖ▓Ó╣āÓĖŖÓ╣ēÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖäÓĖŻÓĖ▒Ó╣ēÓĖćÓ╣üÓĖŻÓĖüÓ╣āÓĖÖÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓĖüÓĖ▓ÓĖŻÓĖÜÓĖ┤ÓĖÖ
ÓĖŻÓĖ╣ÓĖøÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓĖüÓĖ▓ÓĖŻÓĖÜÓĖ┤ÓĖÖ
ÓĖĢÓ╣łÓĖŁÓĖĪÓĖ▓Ó╣ĆÓĖĪÓĖĘÓ╣łÓĖŁÓĖĪÓĖĄÓĖüÓĖ▓ÓĖŻÓĖ×ÓĖ▒ÓĖÆÓĖÖÓĖ▓ÓĖüÓĖźÓ╣äÓĖüÓ╣āÓĖ½Ó╣ēÓĖöÓĖĄÓĖóÓĖ┤Ó╣łÓĖćÓĖéÓĖČÓ╣ēÓĖÖÓĖĪÓĖ▒ÓĖÖÓĖłÓĖČÓĖćÓĖ¢ÓĖ╣ÓĖüÓĖÖÓĖ│ÓĖĪÓĖ▓Ó╣āÓĖŖÓ╣ēÓ╣āÓĖÖÓĖŚÓĖ▓ÓĖćÓĖüÓĖ▓ÓĖŻÓĖäÓ╣ēÓĖ▓ ÓĖłÓĖÖÓĖĪÓĖĄÓĖüÓĖ▓ÓĖŻÓĖÖÓĖ│Ó╣äÓĖøÓ╣āÓĖŖÓ╣ēÓĖćÓĖ▓ÓĖÖÓ╣äÓĖöÓ╣ēÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖĪÓĖ▓ÓĖüÓĖĪÓĖ▓ÓĖóÓĖ½ÓĖźÓĖ▓ÓĖüÓĖ½ÓĖźÓĖ▓ÓĖóÓĖ¬ÓĖ▓ÓĖéÓĖ▓ Ó╣ĆÓĖŖÓ╣łÓĖÖ ÓĖćÓĖ▓ÓĖÖÓĖĀÓĖ▓ÓĖäÓĖŁÓĖĖÓĖĢÓĖ¬ÓĖ▓ÓĖ½ÓĖüÓĖŻÓĖŻÓĖĪ, ÓĖćÓĖ▓ÓĖÖÓĖ¦ÓĖ┤ÓĖ©ÓĖ¦ÓĖüÓĖŻÓĖŻÓĖĪ, ÓĖćÓĖ▓ÓĖÖÓĖŚÓĖ▓ÓĖćÓĖüÓĖ▓ÓĖŻÓ╣üÓĖ×ÓĖŚÓĖóÓ╣ī, ÓĖćÓĖ▓ÓĖÖÓĖŚÓĖ▓ÓĖćÓĖ¦ÓĖ┤ÓĖŚÓĖóÓĖ▓ÓĖ©ÓĖ▓ÓĖ¬ÓĖĢÓĖŻÓ╣ī, ÓĖćÓĖ▓ÓĖÖÓĖŚÓĖ▓ÓĖćÓĖ¦ÓĖ┤ÓĖŚÓĖóÓĖ▓ÓĖ©ÓĖ▓ÓĖ¬ÓĖĢÓĖŻÓ╣ī ÓĖ»ÓĖźÓĖ» ÓĖ¬Ó╣łÓĖ¦ÓĖÖÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖźÓĖ░Ó╣ĆÓĖŁÓĖĄÓĖóÓĖöÓ╣āÓĖÖÓĖüÓĖ▓ÓĖŻÓĖŚÓĖ│ÓĖćÓĖ▓ÓĖÖÓĖéÓĖŁÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖÖÓĖĄÓ╣ē ÓĖĪÓĖ▒ÓĖÖÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖźÓĖ░Ó╣ĆÓĖŁÓĖĄÓĖóÓĖöÓ╣üÓĖĪÓ╣łÓĖÖÓĖóÓĖ│ÓĖĪÓĖ▓ÓĖüÓĖłÓĖÖÓĖÜÓĖ▓ÓĖćÓĖäÓĖŻÓĖ▒Ó╣ēÓĖć ÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖźÓĖ░Ó╣ĆÓĖŁÓĖĄÓĖóÓĖöÓ╣äÓĖöÓ╣ēÓĖ¢ÓĖČÓĖćÓĖéÓĖÖÓĖ▓ÓĖöÓ╣ĆÓĖøÓ╣ćÓĖÖÓ╣äÓĖĪÓĖäÓĖŻÓĖŁÓĖÖ (mm: 1 ´10-6 m) Ó╣ĆÓĖźÓĖóÓĖŚÓĖĄÓ╣ĆÓĖöÓĖĄÓĖóÓĖ¦
ÓĖ¬ÓĖĪÓĖüÓĖ▓ÓĖŻÓĖüÓĖźÓ╣äÓĖüÓĖŻÓĖ░ÓĖÜÓĖÜÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź Ó╣āÓĖÖÓĖŁÓĖćÓĖ©ÓĖ▓ÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░ (DOF) Ó╣éÓĖöÓĖóÓĖŻÓĖ¦ÓĖĪÓĖéÓĖŁÓĖćÓĖŻÓĖ░ÓĖÜÓĖÜÓ╣äÓĖöÓ╣ēÓĖŚÓĖ│ÓĖüÓĖ▓ÓĖŻÓĖŁÓĖśÓĖ┤ÓĖÜÓĖ▓ÓĖóÓ╣éÓĖöÓĖóÓ╣āÓĖŖÓ╣ēÓĖüÓĖÅÓ╣ĆÓĖüÓĖōÓĖæÓ╣īÓĖéÓĖŁÓĖćÓĖäÓĖ▒ÓĖĢÓĖŗÓ╣īÓ╣üÓĖÜÓ╣ćÓĖä (Kutzbach criterion) Ó╣ĆÓĖøÓ╣ćÓĖÖÓ╣äÓĖøÓĖĢÓĖ▓ÓĖĪÓĖ¬ÓĖĪÓĖüÓĖ▓ÓĖŻÓĖöÓĖ▒ÓĖćÓĖÖÓĖĄÓ╣ē

ÓĖ¬ÓĖĪÓĖüÓĖ▓ÓĖŻÓĖäÓĖ▒ÓĖĢÓĖŗÓ╣īÓ╣üÓĖÜÓ╣ćÓĖä
ÓĖüÓĖ│ÓĖ½ÓĖÖÓĖöÓ╣āÓĖ½Ó╣ē M = ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖ¬ÓĖ▒ÓĖĪÓĖ×ÓĖ▒ÓĖÖÓĖśÓ╣īÓĖŻÓĖ░ÓĖ½ÓĖ¦Ó╣łÓĖ▓ÓĖćÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣ł (Mobility)
ci = ÓĖéÓ╣ēÓĖŁÓĖłÓĖ│ÓĖüÓĖ▒ÓĖö (Constraints)
ne = ÓĖ¬Ó╣łÓĖ¦ÓĖÖÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖŻÓĖ¦ÓĖĪÓĖéÓĖŁÓĖćÓĖŻÓĖ░ÓĖÜÓĖÜ
ÓĖüÓĖ▓ÓĖŻÓĖäÓĖ│ÓĖÖÓĖ¦ÓĖōÓĖéÓĖŁÓĖćÓĖŁÓĖćÓĖ©ÓĖ▓ÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░ÓĖéÓĖŁÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓ╣üÓĖÜÓĖÜÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī ÓĖ½ÓĖŻÓĖĘÓĖŁÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź
ÓĖŖÓĖ┤Ó╣ēÓĖÖÓĖ¬Ó╣łÓĖ¦ÓĖÖÓĖéÓĖŁÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓ╣éÓĖöÓĖóÓĖŻÓĖ¦ÓĖĪ = ÓĖŖÓĖĖÓĖöÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī 6 ÓĖäÓĖ╣ÓĖō 2 ÓĖŖÓĖ┤Ó╣ēÓĖÖÓĖ¬Ó╣łÓĖ¦ÓĖÖ + ÓĖÉÓĖ▓ÓĖÖ 1 + 1 Ó╣üÓĖŚÓ╣łÓĖÖÓĖÉÓĖ▓ÓĖÖ
= 2 ´ 6 + 1 + 1 = 14
ÓĖłÓĖ░Ó╣äÓĖöÓ╣ēÓĖŖÓĖ┤Ó╣ēÓĖÖÓĖ¬Ó╣łÓĖ¦ÓĖÖÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖüÓĖźÓĖéÓĖŁÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖÖÓ╣ēÓĖŁÓĖó Ó╣ĆÓĖŚÓ╣łÓĖ▓ÓĖüÓĖ▒ÓĖÜ 14 ÓĖŖÓĖ┤Ó╣ēÓĖÖ
ÓĖ½ÓĖ▓ÓĖŁÓĖćÓĖ©ÓĖ▓ÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░Ó╣éÓĖöÓĖóÓĖŻÓĖ¦ÓĖĪ DOFtotal = 6(ne - 1)
= 6(14 - 1)
= 6 ´ 13
= 78 DOF
ÓĖöÓĖ▒ÓĖćÓĖÖÓĖ▒Ó╣ēÓĖÖ ÓĖŁÓĖćÓĖ©ÓĖ▓ÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░Ó╣éÓĖöÓĖóÓĖŻÓĖ¦ÓĖĪÓ╣ĆÓĖŚÓ╣łÓĖ▓ÓĖüÓĖ▒ÓĖÜ 78 DOF
|
ÓĖłÓĖ│ÓĖÖÓĖ¦ÓĖÖ
|
ÓĖ¬ÓĖ┤Ó╣łÓĖćÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖüÓĖ┤ÓĖöÓĖéÓĖČÓ╣ēÓĖÖ
|
ÓĖéÓ╣ēÓĖŁÓĖłÓĖ│ÓĖüÓĖ▒ÓĖö
|
ÓĖŁÓĖćÓĖ©ÓĖ▓ÓĖŁÓĖ┤ÓĖ¬ÓĖŻÓĖ░
|
ÓĖŁÓĖśÓĖ┤ÓĖÜÓĖ▓ÓĖóÓĖźÓĖ▒ÓĖüÓĖ®ÓĖōÓĖ░
|
|
6
|
ÓĖÉÓĖ▓ÓĖÖ: Ó╣ĆÓĖŖÓĖĘÓ╣łÓĖŁÓĖĪÓĖĢÓ╣łÓĖŁ (Yokes) ½ UJ
|
4
|
2
|
RR
|
|
6
|
Ó╣üÓĖŚÓ╣łÓĖćÓĖŚÓĖŻÓĖćÓĖüÓĖŻÓĖ░ÓĖÜÓĖŁÓĖü Ó╣üÓĖźÓĖ░Ó╣üÓĖŚÓ╣łÓĖćÓĖóÓĖ▓ÓĖ¦
|
4
|
2
|
TR
|
|
6
|
Ó╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖ/ÓĖÉÓĖ▓ÓĖÖ UJ
|
4
|
2
|
RR
|
|
ÓĖéÓ╣ēÓĖŁÓĖ¬ÓĖ▒ÓĖćÓ╣ĆÓĖüÓĖĢ: R: ÓĖ½ÓĖĪÓĖĖÓĖÖ, T: Ó╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣ł, UJ: ÓĖéÓ╣ēÓĖŁÓĖĢÓ╣łÓĖŁÓĖŁÓ╣ĆÓĖÖÓĖüÓĖøÓĖŻÓĖ░ÓĖ¬ÓĖćÓĖäÓ╣ī (Universal joint), Cyl: ÓĖŚÓĖŻÓĖćÓĖüÓĖŻÓĖ░ÓĖÜÓĖŁÓĖü
|
ÓĖĢÓĖ▓ÓĖŻÓĖ▓ÓĖćÓĖüÓĖ▓ÓĖŻÓĖ¦ÓĖ┤Ó╣ĆÓĖäÓĖŻÓĖ▓ÓĖ░ÓĖ½Ó╣īÓĖŻÓĖ░ÓĖÜÓĖÜÓ╣üÓĖŚÓ╣łÓĖÖÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī
Ó╣āÓĖÖÓĖĢÓĖ▓ÓĖŻÓĖ▓ÓĖć ÓĖéÓ╣ēÓĖŁÓĖłÓĖ│ÓĖüÓĖ▒ÓĖöÓ╣éÓĖöÓĖóÓĖŻÓĖ¦ÓĖĪ = 3 ´ 6 ´ 4 = 72 ÓĖéÓ╣ēÓĖŁÓĖłÓĖ│ÓĖüÓĖ▒ÓĖö
Ó╣ĆÓĖ×ÓĖŻÓĖ▓ÓĖ░ÓĖēÓĖ░ÓĖÖÓĖ▒Ó╣ēÓĖÖ
M = 78 – 72 = 6 DOF (ÓĖ¬ÓĖ▓ÓĖĪÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣ł Ó╣üÓĖźÓĖ░ÓĖ¬ÓĖ▓ÓĖĪÓĖüÓĖ▓ÓĖŻÓĖ½ÓĖĪÓĖĖÓĖÖ)
ÓĖŻÓĖ╣ÓĖøÓĖ£ÓĖ▒ÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ
ÓĖŻÓĖ╣ÓĖøÓ╣üÓĖÖÓĖ¦ÓĖüÓĖ▓ÓĖŻÓĖ½ÓĖĪÓĖĖÓĖÖÓĖÉÓĖ▓ÓĖÖÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓ╣üÓĖÜÓĖÜÓ╣ĆÓĖŁÓĖĄÓĖóÓĖć
ÓĖŻÓĖ╣ÓĖøÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖüÓĖźÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ
Ó╣éÓĖöÓĖóÓĖüÓĖ▓ÓĖŻÓĖ£ÓĖ¬ÓĖĪÓĖ£ÓĖ¬ÓĖ▓ÓĖÖÓ╣éÓĖäÓĖŻÓĖćÓĖéÓĖŁÓĖćÓ╣éÓĖäÓĖŻÓĖćÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄ 8 ÓĖöÓ╣ēÓĖ▓ÓĖÖ ÓĖöÓĖ╣ÓĖŚÓĖĄÓ╣łÓĖŻÓĖ╣ÓĖøÓĖöÓ╣ēÓĖ▓ÓĖÖÓĖźÓ╣łÓĖ▓ÓĖć
ÓĖŻÓĖ╣ÓĖøÓ╣üÓĖÜÓĖÜÓĖłÓĖ│ÓĖźÓĖŁÓĖćÓ╣éÓĖäÓĖŻÓĖćÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓĖéÓĖŁÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ
ÓĖŻÓĖ╣ÓĖøÓ╣éÓĖäÓĖŻÓĖćÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣łÓĖĢÓĖ┤ÓĖöÓĖĢÓĖ▒Ó╣ēÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ
ÓĖłÓĖ▓ÓĖüÓĖüÓĖ▓ÓĖŻÓĖ×ÓĖ┤ÓĖłÓĖ▓ÓĖŻÓĖōÓĖ▓ÓĖ¬ÓĖ┤Ó╣łÓĖćÓĖöÓ╣ēÓĖ▓ÓĖÖÓĖÜÓĖÖÓĖéÓĖŁÓĖćÓĖŁÓĖĖÓĖøÓĖüÓĖŻÓĖōÓ╣īÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖŻÓĖ░ÓĖÜÓĖÜÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź ÓĖłÓĖ░Ó╣äÓĖöÓ╣ēÓ╣éÓĖäÓĖŻÓĖćÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣üÓĖéÓ╣ćÓĖćÓ╣üÓĖüÓĖŻÓ╣łÓĖć ÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖŚÓĖÖÓĖŚÓĖ▓ÓĖÖÓĖĢÓ╣łÓĖŁÓ╣üÓĖŻÓĖćÓĖüÓĖŻÓĖ░Ó╣üÓĖŚÓĖüÓĖéÓĖōÓĖ░ÓĖŚÓĖ│ÓĖćÓĖ▓ÓĖÖ ÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣üÓĖĪÓ╣łÓĖÖÓĖóÓĖ│Ó╣ĆÓĖ¦ÓĖźÓĖ▓ÓĖŚÓĖ│ÓĖćÓĖ▓ÓĖÖ, Ó╣āÓĖ½Ó╣ēÓĖäÓĖĖÓĖōÓĖĀÓĖ▓ÓĖ×ÓĖ£ÓĖ┤ÓĖ¦ÓĖćÓĖ▓ÓĖÖÓĖŚÓĖĄÓ╣łÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖźÓĖ░Ó╣ĆÓĖŁÓĖĄÓĖóÓĖö (ÓĖüÓĖŻÓĖōÓĖĄÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖĪÓĖĘÓĖŁÓĖüÓĖź)
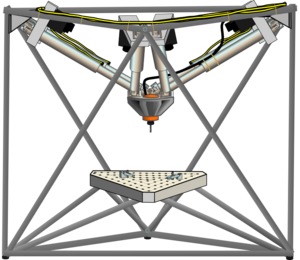
ÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖŚÓĖĄÓ╣łÓĖÖÓĖ│ÓĖĪÓĖ▓Ó╣āÓĖŖÓ╣ēÓ╣āÓĖÖÓĖćÓĖ▓ÓĖÖÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖĪÓĖĘÓĖŁÓĖüÓĖź ÓĖüÓ╣ćÓĖäÓĖĘÓĖŁÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖüÓĖ▒ÓĖö 6 Ó╣üÓĖüÓĖÖ ÓĖŻÓĖ░ÓĖÜÓĖÜÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź ÓĖĪÓĖĄÓ╣ĆÓĖ×ÓĖźÓĖ▓ÓĖ½ÓĖĪÓĖĖÓĖÖÓ╣üÓĖÖÓĖ¦ÓĖÖÓĖŁÓĖÖÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪÓ╣üÓĖøÓĖöÓĖöÓ╣ēÓĖ▓ÓĖÖ (Horizontal spindle Octahedral Hexapod: HOH) -600 Ó╣üÓĖźÓĖ░Ó╣ĆÓĖ×ÓĖźÓĖ▓ÓĖ½ÓĖĪÓĖĖÓĖÖÓ╣üÓĖÖÓĖ¦ÓĖĢÓĖ▒Ó╣ēÓĖćÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪÓ╣üÓĖøÓĖöÓĖöÓ╣ēÓĖ▓ÓĖÖ (Vertical spindle Octahedral Hexapod: VOH) – 1000 ÓĖöÓĖ╣ÓĖŚÓĖĄÓ╣łÓĖŻÓĖ╣ÓĖøÓĖöÓ╣ēÓĖ▓ÓĖÖÓĖźÓ╣łÓĖ▓ÓĖć
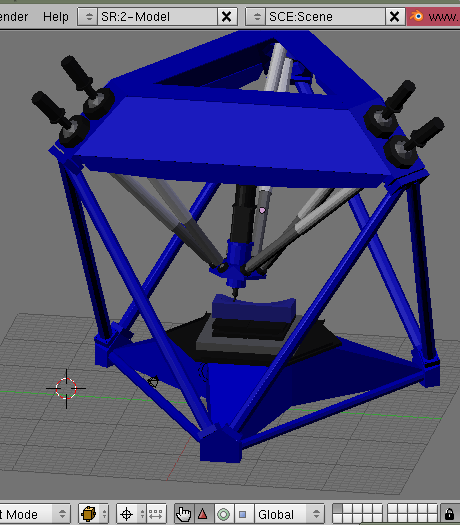
ÓĖŻÓĖ╣ÓĖøÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖĪÓĖĘÓĖŁÓĖüÓĖźÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖéÓĖŁÓĖćÓĖóÓĖĄÓ╣łÓĖ½Ó╣ēÓĖŁÓĖŁÓĖ┤ÓĖÖÓ╣ĆÓĖłÓĖŁÓĖŻÓ╣īÓ╣éÓĖŗÓĖź ÓĖŻÓĖĖÓ╣łÓĖÖ ÓĖŁÓĖŁÓĖäÓĖŚÓĖ▓ÓĖ«ÓĖĄÓĖöÓĖŻÓĖŁÓĖź Ó╣ĆÓĖ«ÓĖüÓĖ░ÓĖ×ÓĖŁÓĖö Ó╣ĆÓĖ«ÓĖŖÓ╣éÓĖŁÓ╣ĆÓĖ«ÓĖŖ-600 (Octahedral Hexapod (HOH) 600)
ÓĖĪÓĖĄÓ╣éÓĖäÓĖŻÓĖćÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓ╣ĆÓĖøÓ╣ćÓĖÖÓĖŻÓĖ╣ÓĖøÓ╣ĆÓĖ½ÓĖźÓĖĄÓ╣łÓĖóÓĖĪÓ╣üÓĖøÓĖöÓĖöÓ╣ēÓĖ▓ÓĖÖ (Octahedron) ÓĖĪÓĖĄÓĖ¬Ó╣łÓĖ¦ÓĖÖÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖéÓĖŁÓĖćÓĖäÓĖ▓ÓĖÖ 12 ÓĖŚÓ╣łÓĖŁÓĖÖÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖóÓĖ▓ÓĖ¦Ó╣ĆÓĖŚÓ╣łÓĖ▓ÓĖüÓĖ▒ÓĖÖ ÓĖĪÓĖĄÓĖéÓ╣ēÓĖŁÓĖĢÓ╣łÓĖŁÓĖ½ÓĖüÓĖłÓĖĖÓĖöÓ╣ĆÓĖŖÓĖĘÓ╣łÓĖŁÓĖĪ Ó╣éÓĖäÓĖŻÓĖćÓĖ¬ÓĖŻÓ╣ēÓĖ▓ÓĖćÓĖĪÓĖĄÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣üÓĖéÓ╣ćÓĖćÓ╣üÓĖüÓĖŻÓ╣łÓĖć ÓĖŻÓĖŁÓĖćÓĖŻÓĖ▒ÓĖÜÓĖÖÓ╣ēÓĖ│ÓĖ½ÓĖÖÓĖ▒ÓĖü ÓĖÉÓĖ▓ÓĖÖÓĖĢÓĖ▒ÓĖ¦Ó╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖć, ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖ▒ÓĖ¦Ó╣ĆÓĖ×ÓĖźÓĖ▓ÓĖ½ÓĖĪÓĖĖÓĖÖ, ÓĖüÓĖźÓ╣äÓĖüÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓ╣äÓĖ«ÓĖöÓĖŻÓĖŁÓĖźÓĖ┤ÓĖüÓĖ¬Ó╣īÓĖ×ÓĖŻÓ╣ēÓĖŁÓĖĪÓĖüÓĖ▒ÓĖÜÓ╣üÓĖŚÓ╣łÓĖćÓ╣üÓĖüÓĖÖÓĖ¬Ó╣äÓĖźÓĖöÓ╣ī ÓĖøÓĖŻÓĖ░ÓĖüÓĖŁÓĖÜÓĖĢÓĖ┤ÓĖöÓĖüÓĖ▒ÓĖÜÓ╣üÓĖ£Ó╣łÓĖÖÓĖÉÓĖ▓ÓĖÖÓĖŁÓĖóÓĖ╣Ó╣łÓĖüÓĖ▒ÓĖÜÓĖŚÓĖĄÓ╣ł Ó╣üÓĖźÓĖ░Ó╣üÓĖ£Ó╣łÓĖÖÓĖÉÓĖ▓ÓĖÖÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣ł (ÓĖĢÓĖ┤ÓĖöÓĖ½ÓĖ▒ÓĖ¦Ó╣ĆÓĖ×ÓĖźÓĖ▓ÓĖ½ÓĖĪÓĖĖÓĖÖ)
ÓĖĢÓĖ▒ÓĖ¦ÓĖŁÓĖóÓ╣łÓĖ▓ÓĖćÓĖéÓ╣ēÓĖŁÓĖĪÓĖ╣ÓĖźÓĖŚÓĖ▓ÓĖćÓĖöÓ╣ēÓĖ▓ÓĖÖÓ╣ĆÓĖŚÓĖäÓĖÖÓĖ┤ÓĖäÓĖéÓĖŁÓĖćÓĖŻÓĖĖÓ╣łÓĖÖ VOH-1000 ÓĖĪÓĖĄÓĖöÓĖ▒ÓĖćÓĖÖÓĖĄÓ╣ē
Ó╣üÓĖüÓĖÖÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣ł: X, Y, Z = 600, 600, 800 mm
ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓ÓĖøÓ╣ēÓĖŁÓĖÖ: ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓ÓĖøÓ╣ēÓĖŁÓĖÖÓĖ¬ÓĖ╣ÓĖćÓĖ¬ÓĖĖÓĖö (ÓĖĢÓĖ▓ÓĖĪÓ╣üÓĖüÓĖÖ) = 30 m/min
ÓĖŁÓĖ▒ÓĖĢÓĖŻÓĖ▓ÓĖüÓĖ▓ÓĖŻÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓĖ¬ÓĖ╣ÓĖćÓĖ¬ÓĖĖÓĖö (ÓĖĢÓĖ▓ÓĖĪÓ╣üÓĖüÓĖÖ) = 30 m/min
ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓ╣łÓĖć: 0.5 G (4.8 m/s2) ÓĖŚÓĖ▒Ó╣ēÓĖćÓĖÖÓĖĄÓ╣ēÓĖéÓĖČÓ╣ēÓĖÖÓĖŁÓĖóÓĖ╣Ó╣łÓĖüÓĖ▒ÓĖÜÓĖĢÓĖ│Ó╣üÓĖ½ÓĖÖÓ╣łÓĖć X, Y, Z
Ó╣ĆÓĖ×ÓĖźÓĖ▓ÓĖ½ÓĖĪÓĖĖÓĖÖ: ÓĖŖÓ╣łÓĖ¦ÓĖćÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣ĆÓĖŻÓ╣ćÓĖ¦ = 0 – 20,000 rpm
Ó╣üÓĖŻÓĖćÓĖÜÓĖ┤ÓĖöÓĖ¬ÓĖ╣ÓĖćÓĖ¬ÓĖĖÓĖö = 49 Nm
ÓĖüÓĖ│ÓĖźÓĖ▒ÓĖćÓĖćÓĖ▓ÓĖÖÓĖ¬ÓĖ╣ÓĖćÓĖ¬ÓĖĖÓĖö = 37.5 kW
ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓĖöÓĖ▒ÓĖÖÓĖ½ÓĖźÓ╣łÓĖŁÓ╣ĆÓĖóÓ╣ćÓĖÖ: 50 ÓĖÜÓĖ▓ÓĖŻÓ╣īÓĖ£Ó╣łÓĖ▓ÓĖÖÓ╣ĆÓĖ×ÓĖźÓĖ▓ÓĖ½ÓĖĪÓĖĖÓĖÖ
ÓĖŗÓĖŁÓĖćÓ╣ĆÓĖüÓ╣ćÓĖÜÓĖĪÓĖĄÓĖö: 40, 80 ÓĖĢÓĖ▒ÓĖ¦, ÓĖÖÓĖ│ÓĖ½ÓĖÖÓĖ▒ÓĖüÓĖéÓĖŁÓĖćÓĖĪÓĖĄÓĖöÓĖ¬ÓĖ╣ÓĖćÓĖ¬ÓĖĖÓĖö = 12 ÓĖüÓĖ┤Ó╣éÓĖźÓĖüÓĖŻÓĖ▒ÓĖĪ
ÓĖäÓĖ¦ÓĖ▓ÓĖĪÓ╣üÓĖĪÓ╣łÓĖÖÓĖóÓĖ│ÓĖŚÓĖ▓ÓĖćÓĖøÓĖŻÓĖ┤ÓĖĪÓĖ▓ÓĖĢÓĖŻ: 20 Ó╣äÓĖĪÓĖäÓĖŻÓĖŁÓĖÖ ÓĖüÓĖ▓ÓĖŻÓ╣āÓĖŖÓ╣ēÓ╣ĆÓĖźÓ╣ĆÓĖŗÓĖŁÓĖŻÓ╣īÓĖ¦ÓĖ▒ÓĖöÓ╣üÓĖÖÓĖ¦ÓĖŚÓ╣üÓĖóÓĖćÓĖĪÓĖĖÓĖĪÓ╣ĆÓĖäÓĖźÓĖĘÓ╣łÓĖŁÓĖÖÓĖŚÓĖĄÓ╣łÓĖ¬ÓĖ░ÓĖöÓĖ¦ÓĖü
ÓĖŻÓĖ╣ÓĖøÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖĪÓĖĘÓĖŁÓĖüÓĖźÓĖ½ÓĖüÓ╣üÓĖüÓĖÖ
ÓĖ¦ÓĖ┤ÓĖöÓĖĄÓ╣éÓĖŁÓ╣ĆÓĖäÓĖŻÓĖĘÓ╣łÓĖŁÓĖćÓĖĪÓĖĘÓĖŁÓĖüÓĖźÓĖ½ÓĖüÓ╣üÓĖüÓĖÖÓĖŗÓĖĄÓ╣ĆÓĖŁÓ╣ćÓĖÖÓĖŗÓĖĄÓĖüÓĖ▒ÓĖöÓ╣äÓĖĪÓ╣ē
ÓĖéÓ╣ēÓĖŁÓĖäÓĖ┤ÓĖöÓĖöÓĖĄ Ó╣å ÓĖŚÓĖĄÓ╣łÓĖÖÓĖ│ÓĖĪÓĖ▓ÓĖØÓĖ▓ÓĖü
“ÓĖäÓĖÖÓĖŚÓĖĄÓ╣łÓĖŻÓĖ╣Ó╣ēÓĖłÓĖ▒ÓĖüÓĖłÓĖĖÓĖöÓĖ½ÓĖĪÓĖ▓ÓĖóÓĖøÓĖźÓĖ▓ÓĖóÓĖŚÓĖ▓ÓĖćÓĖéÓĖŁÓĖćÓĖĢÓĖÖÓ╣ĆÓĖŁÓĖć
ÓĖäÓĖĘÓĖŁÓĖäÓĖÖÓĖŚÓĖĄÓ╣łÓ╣ĆÓĖöÓĖ┤ÓĖÖÓĖŚÓĖ▓ÓĖćÓ╣äÓĖøÓ╣äÓĖöÓ╣ēÓ╣äÓĖüÓĖźÓĖŚÓĖĄÓ╣łÓĖ¬ÓĖĖÓĖö”
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}